

メーカーも種類も異なるロボットが共通のシステムで運用可能に
2020-03-30 新エネルギー・産業技術総合開発機構,株式会社東芝
NEDOは、「ロボット活用型市場化適用技術開発プロジェクト」を実施しており、NEDOと東芝は自律型移動ロボットと運行管理システムを接続するためのインターフェースAMR-IF(Autonomous Mobile Robot Interface)の仕様を策定しました。今般、AMR-IFに準拠した操作端末(GUI)ソフトウェアのサンプルをオープンソースソフトウェアとして、本日から公開します。本ソフトウェアを活用することで、メーカーや種類が異なる複数の移動ロボットを、共通のシステムで運用でき、ロボット未活用領域でのロボットの普及や低コスト化が期待できます。
今後、AMR-IFが移動ロボットの標準インターフェースとなるよう、国際標準化を目指します。
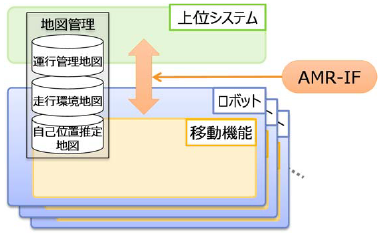
図1 自律型移動ロボット向けインターフェースAMR-IF
1. 概要
製造・物流現場や公共施設内での、搬送や警備、清掃などさまざまな業務で、自律型移動ロボットが普及しつつあります。現状、これらの移動ロボットでは、各メーカーが上位システムの運行管理システムを開発し、独自のインターフェースで移動ロボットと接続しています。そのため、メーカーの異なる移動ロボットを新たに導入する際には、運行管理システムを開発しなおす必要があります。また、複数メーカー、複数種類の移動ロボットを同じ運行管理システムに接続することもできません。これらはロボットを導入する上で大きな阻害要因となっています。
このような課題を解決するため、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)と株式会社東芝は、NEDOの「ロボット活用型市場化適用技術開発プロジェクト※」の一環として、移動ロボットと運行管理システムとの相互接続手順を定めた移動ロボットインターフェースAMR-IF(Autonomous Mobile Robot Interface)の仕様を策定しました。AMR-IFを活用することで、メーカーや種類が異なる複数の移動ロボットを共通のシステムで運用することが可能となります。これにより、上位システムを構築するシステムインテグレーターや移動ロボットのメーカーが、移動ロボットを使ったシステムを開発しやすくなり、ロボット未活用領域でのロボットの普及や低コスト化が期待できます。
そして、今般、このAMR-IFに準拠した操作端末(GUI)ソフトウェアのサンプルをオープンソースソフトウェア(OSS)として3月30日に公開します。
また、本サンプルソフトは、以下からもアクセス可能です。
2. 今回の成果
AMR-IFは、移動ロボットの運行管理に必要な地図情報、走行経路指示、ロボットの現在位置情報などのプロトコル(規約)を定めたものです。このAMR-IFの仕様に準拠することで、複数台の移動ロボットの効率的な経路計画の策定や、デッドロック(複数ロボット同時進入による行き詰まり)回避などを行う運行管理システムの構築が可能となります。
今回公開するGUIソフトウェアを用いて、2019年12月に開催された「国際ロボット展2019」のNEDOブースにて、THK株式会社、株式会社セック、パナソニック株式会社とともに、メーカーも種類も異なる3台の移動ロボット連携デモを行い、一つの上位システムで異なるメーカーのロボットを管理できることを実証しました。
このソフトウェアの活用により、システムインテグレーターやロボットメーカーはAMR-IFに準拠した運行管理システムを容易に開発することができます。同時に、東芝は、利用者からのフィードバックを活用して、インターフェースの充実・改善を図っていきます。

図2 国際ロボット展に出展した3台の移動ロボット
3. 今後の予定
現在、「ロボット新戦略」(2015年2月10日日本経済再生本部決定)に基づいて設立されたロボット革命イニシアティブ協議会(RRI)においても、移動ロボットのソフトウェアアーキテクチャについて議論され、その仕様策定が進められており、AMR-IFはこの仕様にも準拠しています。東芝は、引き続き、AMR-IFの標準化(デファクトスタンダード化)を図るとともに、RRIの活動などを通じて国際標準化も目指します。
【注釈】
- ※ ロボット活用型市場化適用技術開発プロジェクト
- 期間:2015年度~2019年度(委託事業は2017年度~2019年度)
4. 問い合わせ先
(本ニュースリリースの内容についての問い合わせ先)
NEDO ロボット・AI部 担当:和佐田、大橋、茂手木
東芝 コーポレートコミュニケーション部 広報・IR室 担当:外間
(その他NEDO事業についての一般的な問い合わせ先)
NEDO 広報部 担当:佐藤、坂本


