ロボットなどの機械制御分野への応用展開に期待
2020-03-24 新エネルギー・産業技術総合開発機構,早稲田大学,日本ペイントホールディングス株式会社
NEDOは、有望な技術シーズを発掘するための先導研究プログラムを実施しており、今般、早稲田大学、日本ペイントホールディングス(株)と共同で、長期貯蔵でも沈降しない高い安定性を持つ磁気粘弾性流体(MR流体)を開発しました。
MR流体は、鉄などの磁性粒子をオイルなどの分散媒体に分散させた流体で、車両のブレーキや制震機、ロボットのアクチュエーターなど機械制御への応用が期待されています。しかし、従来のMR流体は、分散媒体中の磁性粒子が沈降しやすいため、長期間使用すると、装置の損傷や動作が不安定になるといった課題がありました。今回開発したMR流体は、磁性粒子の沈降を抑制するための側鎖を持つポリオキシレン脂肪酸アミド誘導体を分散媒体に適用するとともに、直径20~300nmのナノ粒子を分散媒体に添加することで、半年の静置状態でも分離せず、外部からの磁場に対して高い応力を発揮することに成功しました。
今回の成果により、MR流体を長期間にわたって利用することが可能となり、ロボットを始めとするさまざまな機械制御分野へ応用展開が期待されます。
を開発")
図1 開発したMR流体(左)と従来のMR流体(右)の沈降分離状態の比較(180日後)
1.概要
磁気粘弾性流体(MR流体※1)は、鉄などの磁性粒子をオイルなどの分散媒体に分散させた流体で、外部から磁場を加えることによって粘度が変化する特性を持ちます。車両のブレーキや制震機などの制御に使うと、装置を簡素化できる、大きな減速比をとれる、逆可動性に優れるといった特長を持つほか、電気的な制御により俊敏な粘度制御が可能であるため、医療機器やハプティクス※2、VR(仮想現実)装置など、幅広い分野での利用が期待されています。
従来のMR流体は、磁性粒子が数十μmと比較的大きく、数カ月も長期貯蔵すると、磁性粒子が分散媒体中で沈降することにより、装置の損傷や動作が不安定になるといった課題がありました。一方で、沈降を抑制するため、数十~数百nmの比較的小さな磁性粒子を用いたMR流体も開発されていますが、磁性粒子が小さいために出力が小さくなるほか、微小な粒子そのものの材料コストが高く、一般的な産業に利用するには費用面で難しいのが現状です。
こうした背景から、今回、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)、学校法人早稲田大学、日本ペイントホールディングス株式会社は、「NEDO先導研究プログラム※3」において、長期貯蔵でも沈降しない高い安定性を持つMR流体を開発しました。開発したMR流体は、大きな応力を発揮できる直径数μ~50μmの大きな磁性粒子を主成分として分散しつつ、磁性粒子の沈降を抑制するための側鎖を持つポリオキシレン脂肪酸アミド誘導体を分散媒体に適用するとともに、直径20~300nmのナノ粒子を分散媒体に添加することで、半年間の静置状態でも沈降せず、外部からの磁場に対して高い応力を発揮することに成功しました。
今回の成果により、MR流体を長期間にわたって利用することが可能となり、ロボットをはじめ、さまざまな機械制御分野へ応用されることが期待されます。
2.今回の成果
今回開発したMR流体は、分散媒体に、大きな磁性粒子の沈降を抑制するための側鎖をもつポリオキシレン脂肪酸アミド誘導体(図2)を適用するとともに、さらに磁性粒子よりも小さな(20~300nm)ナノ粒子を所定量添加、分散することを特徴としています(図3)。ポリオキシレン脂肪酸アミド誘導体と微小なナノ粒子により、大きな磁性粒子の沈降を抑制することが可能となりました。
図2 ポリオキシレン脂肪酸アミド誘導体
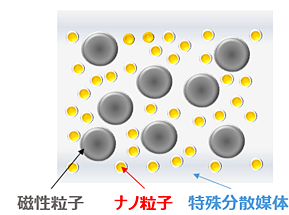
図3 開発したMR流体の概念図
一般に、外部磁場に対応してMR流体が発生する応力は、分散させた磁性粒子の濃度に比例して大きくなります。しかし、磁性粒子の濃度を一定以上にすると、粒子の凝集が発生しやすくなり、流体の分散性は著しく低下します。また、反対に、滑らかな出力には、磁性粒子の濃度を低くする必要がありますが、濃度が低いと沈降しやすくなります。今回開発したMR流体は、これらの課題を解決し、広い出力範囲をカバーしながら高い安定性を兼ね備えています。
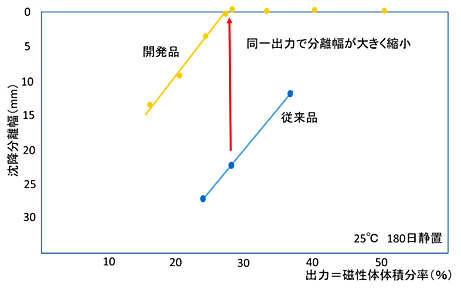
図4 出力範囲―安定性(沈降分離抑制)
また、外部からの磁場(磁束密度)に対しては、従来品と同様に比例した応力を発揮しつつ、高い最大出力を発生できます。
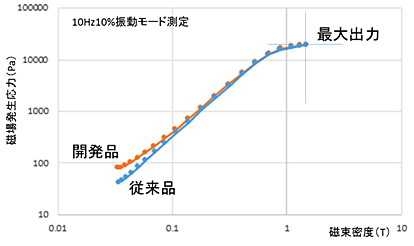
図5 MR流体の磁気粘弾性変化挙動
(従来品と開発品比較 30mT~1.5T)
3.今後の予定
NEDO、早稲田大学、日本ペイントホールディングス(株)は、開発したMR流体を使った、ロボット用柔軟アクチュエーターの開発を引き続き共同で進めます。
また、日本ペイントホールディングス(株)は、これまで塗料分野で培ってきた顔料などの微粒子の分散方法や安定化技術の知見を活かし、産業機械向けに最適化させた新たなMR流体の商品化に向けた開発を進め、さらなる応用分野の開拓を進めます。
【注釈】
- ※1 MR(magneto rheological)流体
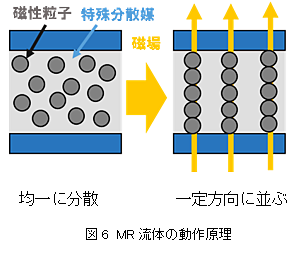
- <原理>
外部からの磁場の印加によって、磁性粒子の配列を制御し、流体の粘度を変化させることが可能。
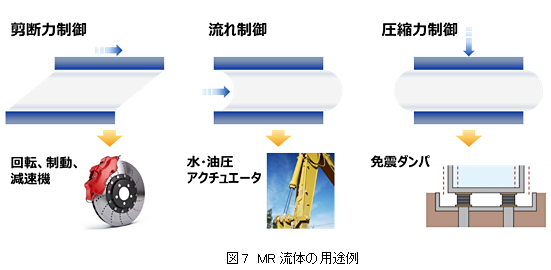
- <用途>
MR流体に対して、外部からの磁場の制御により、剪断応力・流れ・圧縮力など、さまざまな運動制御が可能となるため、回転、制動、減速機、水・油圧アクチュエーター、免震ダンパーなどへの応用が検討されている。
- ※2 ハプティクス
- 利用者に力、振動、動きなどを与えることで皮膚感覚フィードバックを得る技術。
- ※3 NEDO先導研究プログラム
-
- 事業名:
- NEDO先導研究プログラム/新産業創出新技術先導研究プログラム/次世代産業用ソフトロボットの実現に向けた革新的MR材料×駆動機構の融合研究開発
- 事業期間:
- 2018年度~2020年度
4.問い合わせ先
(本ニュースリリースの内容についての問い合わせ先)
NEDO ロボット・AI部 担当:御代川、安川、大岡
早稲田大学 理工学術院総合研究所 担当:主任研究員(研究院准教授) 亀﨑
日本ペイントホールディングス(株) 広報部 担当:山本、市村
(その他NEDO事業についての一般的な問い合わせ先)
NEDO 広報部 担当:佐藤、坂本

