運航管理システムのAPIの順次公開を目指す
2019-03-01 新エネルギー・産業技術総合開発機構,福島県,南相馬市,日本電気株式会社,株式会社NTTデータ,株式会社日立製作所,株式会社NTTドコモ,楽天株式会社,KDDI株式会社,株式会社ゼンリン,日本気象協会
NEDO、日本電気(株)、(株)NTTデータ、(株)日立製作所、(株)NTTドコモ、楽天(株)、KDDI(株)、(株)ゼンリン、(一財)日本気象協会は、福島県と南相馬市の協力のもと、南相馬市復興工業団地内の「福島ロボットテストフィールド」(福島県南相馬市)で、同一空域で複数事業者のドローンが安全に飛行するための運航管理システムの実証試験を行いました。
試験の結果、今回開発した「運航管理統合機能」、「運航管理機能」、「情報提供機能」で構成される運航管理システムが、正常に作動することを確認できました。
来年度以降、今回開発した運航管理システムの普及に向けて、現在NEDOプロジェクトに参画しているドローン事業者以外の国内外のドローン事業者が、運航管理統合機能と接続したドローン運航試験を福島ロボットテストフィールド内で実施できるよう、運航管理システムのAPI(アプリケーション・プログラミング・インターフェース)を順次公開する予定です。さらに、運航管理システムについて、国際標準への提案を見据え、あらゆるドローン事業者が安心・安全にドローンを運航できる社会を目指します。
なお、今回の試験は、2017年11月22日にNEDOと福島県が締結したロボット・ドローンの実証等に関する協力協定に基づく取り組みの一環です。

図1 運航管理システムにおける飛行状況管理画面(イメージ)
1.概要
将来、多数のドローンが飛び交い、物流や郵便、警備、災害調査、点検、測量、農業などのさまざまな分野で活用されることが期待されています。高密度でドローンが飛び交う世界を想定すると、衝突などの危険を確実に回避するため、すべての機体の飛行計画と飛行状況を掌握して、ドローンの運航を統合的に管理する必要があります。さらに、ドローンを安全に運航するためには、気象情報や地形、建物の3次元地図情報をドローン事業者に提供する必要があります。
このような背景のもと、国立研究開発法人 新エネルギー・産業技術総合開発機構(NEDO)は、物流、インフラ点検、災害対応などの分野で活用できる無人航空機の性能評価基準などの研究開発を進めるとともに、安全に社会実装するためのシステム構築および飛行試験などを実施するプロジェクト※1を進めています。具体的には、運航管理システムの開発、衝突回避技術の開発、国際標準化活動に取り組んでいます。
今般、NEDO、日本電気株式会社(NEC)、株式会社NTTデータ、株式会社日立製作所、株式会社NTTドコモ、楽天株式会社、KDDI株式会社、株式会社ゼンリン、一般財団法人日本気象協会は、福島県と南相馬市の協力のもと、南相馬市復興工業団地内の「福島ロボットテストフィールド※2」(福島県南相馬市)で、同一空域で複数事業者のドローンが安全に飛行するための運航管理システムの実証試験を行いました。今回開発した運航管理システムは、本プロジェクトにおいて国立研究開発法人宇宙航空研究開発機構(JAXA)が担当する全体設計に基づいて、次の3つの機能で構成され、それぞれが協調的に動作します。
(1)複数事業者のドローンの運航を共有するための「運航管理統合機能」
例:各ドローンの飛行経路や離着陸場の重複の回避
(2)個別事業者が運航管理システムにアクセスし、サービスを実現するための「運航管理機能」
例:飛行計画の作成や申請、飛行状況の監視
(3)空域の3次元地図・気象情報などの情報を提供する「情報提供機能」
例:詳細な3次元地図情報やドローンが飛行する高度の風速などの気象情報
試験の結果、運航管理システムが正常に作動し、基本的な運航管理機能に基づいて同一空域における複数のドローンの飛行を支援できることを確認できました。今回の試験では、ドローンを活用した「災害調査」、「警備」、「物流」、「郵便」の4つの利用シーンを想定し、合計10機のドローンを目視外で自律飛行させました。
来年度以降、今回の試験結果を評価・検証し、より安全かつ効率的な運航管理を実現するための機能の拡張/高度化を行います。今回開発した運航管理システムの普及に向けて、現在参画しているドローン事業者以外の国内外のドローン事業者が、運航管理統合機能と接続したドローン運航試験を福島ロボットテストフィールド内で実施できるよう、運航管理システムのAPI(アプリケーション・プログラミング・インタフェース)※3を順次公開する予定です。さらに、運航管理システムについて、国際標準への提案を見据え、あらゆるドローン事業者が安心・安全にドローンを運航できる社会を目指します。
なお、今回の試験は、2017年11月22日にNEDOと福島県が締結したロボット・ドローンの実証等に関する協力協定※4に基づく取り組みの一環として実施したものです。
2.運航管理システムの実証試験内容と主な成果
- 実施期間:
- 2019年2月25日~2月28日
- 実施場所:
- 福島県南相馬市 福島ロボットテストフィールドおよびその周辺
- 実施内容:
- 同一空域で複数事業者のドローンが安全に飛行するための運航管理システムの実証試験
- 主な成果:
- 運航管理システムが正常に作動し、「災害調査」、「警備」、「物流」、「郵便」のサービスを実施できました。その際、個別事業者が申請した飛行計画に基づき、ドローンの飛行経路や離着陸場の重複を自動で事前に確認し、気象条件や地理条件を踏まえ、個別事業者に変更を促し、円滑な全体調整を実施できました。
また、リアルタイムに全ドローンの位置情報を一元管理し、ドローンが接近するなど危険な状況が発生していないかを確認し、安全運航に関する情報を個別事業者に提供できました。
運航管理システムの詳細
1.運航管理システムの概要 今回開発した運航管理システムは、運航管理の対象とする空域およびその空域内を飛行するドロー ンの情報を集約し、地図情報や気象情報などを参照しながら、対象のドローンの運航を管理および支援 することで、複数の機体による空域の共用を安全かつ効率的に行うためのシステムです。
運航管理システムは、本プロジェクトにおいて JAXA が担当する全体設計に基づき、図 1 に示す運航 管理統合機能、運航管理機能、情報提供機能の 3 つの機能から構成されます。これらの機能が協調し て、同一空域での複数事業者によるドローンの安全な飛行を実現します。

2.運航管理システムの各機能における各社の役割分担
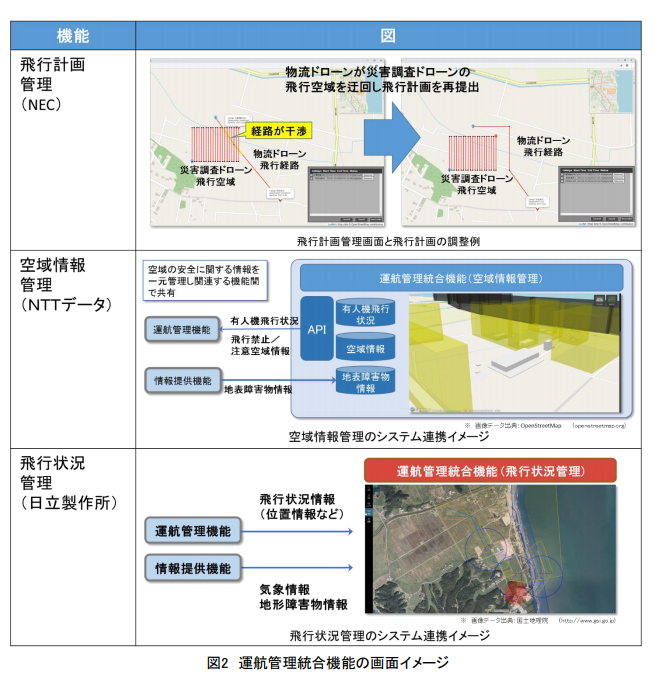
【1】運航管理統合機能
・飛行計画管理(NEC)
複数のドローン事業者が運航管理機能を用いて提出する飛行計画(飛行経路、空域)の情報を管理し、 他の運航管理機能から提出された飛行計画と経路や空域、離発着場使用の干渉などを確認します。さ らにドローンが安全に飛行できる気象かどうかの確認や、3次元地図情報を活用した建物・地形との干渉 の有無なども確認し、飛行計画の干渉があった場合には、その理由を運航管理機能に報告して計画の 見直しを要請します。
・空域情報管理((株)NTTデータ)
複数のドローン事業者が同一空域を協調して安全に利用するために必要な、空域管理の機能を提供 します。各情報提供機能から提供される飛行禁止空域や、地表障害物情報などの情報を一元的に管理 するとともに、APIを介して運航管理統合機能および運航管理機能へ即時に提供します。また、前述の静 的な情報に加え、災害時など突発的に設定される飛行禁止空域を確実にドローン事業者に通知する仕 組みや、同空域を共有する可能性のある有人航空機の位置情報をドローン事業者と共有する仕組みを 提供することで、空域の安全性を高めます。
・飛行状況管理((株)日立製作所)
複数事業者のドローンが飛行する状況下において、各事業者の運航管理機能から通知されるリアル タイムな飛行状況情報を受信し、飛行中の全てのドローンの位置情報、速度、飛行進路の把握を行いま す。また、ドローン同士、ドローンと飛行禁止エリアおよび地表障害物との近接状況、飛行計画と実際の 飛行経路の差分を監視し、必要に応じて運航管理機能に注意喚起を行います。
【2】運航管理機能
・災害調査((株)NTTドコモ)
上空でのモバイルネットワークの利用を想定した運航管理機能により、通信環境を含めたドローンの 安全な運航を支援するとともに、高速かつ大容量通信を活用してドローンに搭載したカメラからリアルタ イムに被災状況の調査を行います。災害発生に伴う上空の通信環境の変化をドローンで測定し、当初 計画した航路上での通信途絶が懸念される場合は、通信環境の安定した飛行経路を再策定します。
・警備(KDDI(株))
本事業においてテラドローン株式会社、セコム株式会社と共同で開発した俯瞰ドローン2機と巡回ドロ ーン2機の計4機を利用した広域施設の遠隔巡回警備向けのアプリケーション※を運航管理機能と情報 提供機能と接続して、モバイルネットワークを活用した広範囲での迅速な警備を実現します。
・物流(楽天(株))
ドローンを活用して物資配送を行う際の運航管理機能を構築するとともに、離発着の利便性と物流の ビジネス形態を考慮して、ドローンの発着と荷物の積み下ろしを行うための新たなドローンポートを試作 し、運用します。この装置は、ドローンがポート上部に配送した荷物を自動的に内部に収納し、荷物の注 文者が電子錠を用いて解錠し、取り出せる機能を備えたものです。
・郵便((株)日立製作所)
複数事業者のドローンが飛行する状況下において、他事業者の飛行計画と干渉することなく最適な飛 行計画立案を支援し、飛行中においては他ドローンとの近接状況を監視・注意喚起を行い、安心・安全 なドローンによる配送サービスを提供します。本実証では、日本郵便株式会社の協力を得て、災害発生 後において仮想郵便局から避難所および個人宅へ、ドローンにより郵便物を配送することを模した飛行 を行います。

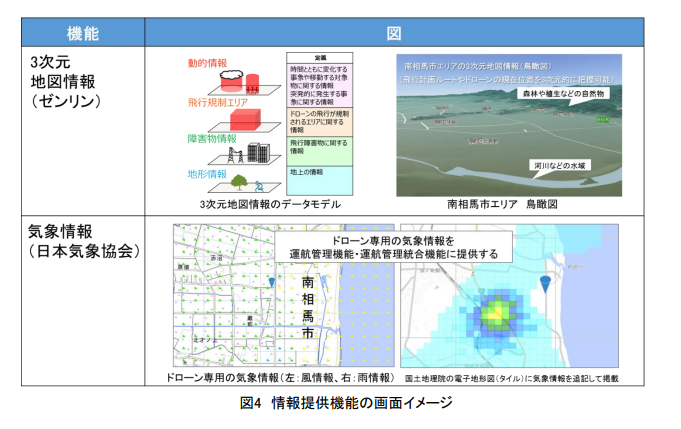
【3】情報提供機能
・3次元地図情報((株)ゼンリン)
福島ロボットテストフィールドを含む南相馬市、浪江町エリアにおいて、3次元地図情報を整備し、運航 管理統合機能、運航管理機能へリアルタイムな情報提供を可能にするAPIの初期開発を完了しました。 ドローンの安全飛行ルートの作成や送電鉄塔や建築物などの障害物への接近の検知に必要な、正確な 高さデータを有する3次元地図情報に加え、(一財)日本気象協会などの提供する気象情報や南相馬市 と共同整備したイベント開催による規制エリアなどの多様な情報を統合し、運航管理統合機能、運航管 理機能へ提供します。
・気象情報((一財)日本気象協会)
福島ロボットテストフィールドの気象観測装置のデータを利用し、高解像度・高頻度に更新するドロー ン専用のリアルタイム風推定システムを開発しました。ドローンが安全かつ効率的に飛行するために必 要な飛行高度の気象情報を運航管理統合機能、運航管理機能に提供します。
【注釈】
※ 広域施設の遠隔巡回警備向けのアプリケーションに関連する発表 世界初、4G LTE で自律飛行する複数ドローンを活用した広域警備に成功(2018 年 3 月 15 日) https://www.nedo.go.jp/news/press/AA5_100928.html
国内初、人物検知可能なスマートドローンによるスタジアム警備の実証に成功(2018 年 12 月 18 日)
https://news.kddi.com/kddi/corporate/newsrelease/2018/12/18/3532.html
3.飛行試験の内容
今回、福島ロボットテストフィールドとその周辺の900m×600mの範囲に離着陸場を8カ所設置し、災害調査、警備、物流、郵便という4つの利用シーンを想定し、安全を確保しながら10機のドローンを15分程度の時間にわたって適切に飛行させました。
運航管理統合機能は複数ドローンの飛行計画の調整および飛行中のリアルタイムでのドローン位置情報管理を、人の手を介さず自動的に実施しました。
【1】情報提供機能による離陸許可
福島ロボットテストフィールドの通信塔に設置された気象観測装置がドローンの飛行する空域高度30mおよび50mの風向風速を5分おきに観測し、ドローンが安全に飛行可能な風速10m/s以下の気象環境であることを確認した上で、離陸の許可を通知しました。
【2】飛行経路の重複解消
災害調査ドローンより面積約300m×200mの調整池の状況を把握するため高度5m~30m、速度4m/sでの飛行計画が申請されました。一方、警備ドローンは高度20m~60m、面積約200m×100mで研究施設周辺の警備を行います。警備ドローンの飛行経路と災害調査ドローンの飛行経路の重複を確認したため、警備ドローンの飛行経路変更を指示し、災害調査ドローンの飛行エリアを迂回する経路の再申請を要請することで飛行経路の重複を解消し、警備ドローンの離陸を許可しました。
【3】離着陸場の利用時間の重複解消
物流ドローンが約2.0kgの救援物資を避難所へ運搬するため、高度40m、速度6m/s、約800mの距離を飛行する計画が提出され承認されました。その後、郵便ドローンが親書を避難所へ運搬するため、高度40m、速度6m/s、約500mの距離を飛行して物流ドローン離着陸場の近くに着陸する計画が提出されましたが、到着が同じタイミングになったため、郵便ドローンへ着陸時間を遅らせる指示をした上で、郵便ドローンの離陸を許可しました。
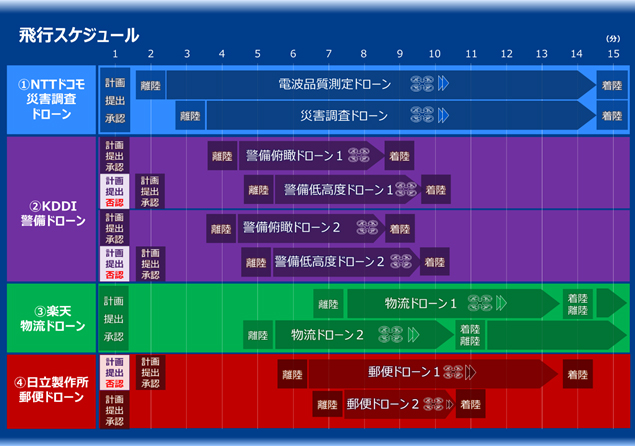
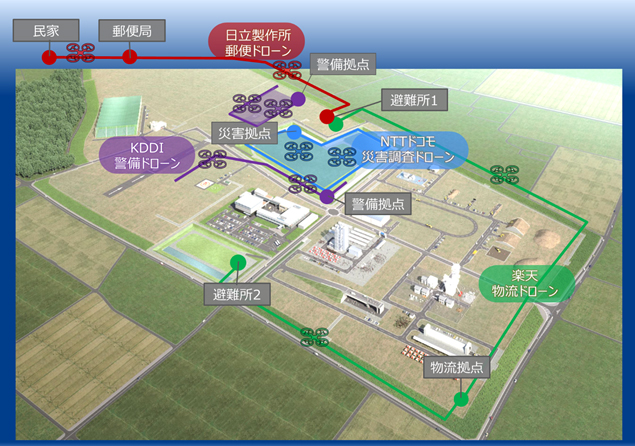
図2 飛行スケジュール(上)と飛行経路図(下)
4.今後の予定
来年度以降、今回の試験結果を評価・検証し、より安全かつ効率的な運航管理を実現するための機能の拡張/高度化を行います。今回参画したドローン事業者以外の国内外のドローン事業者が、運航管理統合機能を利用したドローン運航試験を福島ロボットテストフィールド内で実施できるよう、運航管理システムのAPIを順次公開する予定です。
今後も福島ロボットテストフィールドを活用した飛行試験を引き続き実施し、多数のドローンが安心・安全に空を飛び交う社会の実現を目指します。
また、福島県は、2019年度の福島ロボットテストフィールド完成に向けて、引き続き整備を行っていく予定です。
【注釈】
- ※1 プロジェクト
-
- 事業名:ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト
- 実施期間:2017年度~2021年度の5年間を予定
- 2018年度予算:32.2億円
- ※2 福島ロボットテストフィールド
- 物流、インフラ点検、大規模災害などに活用が期待される無人航空機、災害対応ロボット、水中探査ロボットといった陸・海・空のフィールドロボットを主対象に、実際の使用環境を拠点内で再現しながら、研究開発、実証試験、性能評価、操縦訓練を行うことができる研究開発拠点。福島県南相馬市および浪江町で2018年度から順次開所中。
- ※3 API(アプリケーション・プログラミング・インターフェース)
- プログラムやソフトウェアの機能を共有する仕組み。APIをインターネットに公開することで、国内外の事業者にサービスを提供することができる。
- ※4 ロボット・ドローンの実証等に関する協力協定
- NEDOと福島県の連携を強化し、「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」において福島ロボットテストフィールドを積極的に活用することでロボット・ドローンの実用化を加速させ、福島イノベーション・コースト構想の推進とロボット・ドローン産業の活性化を図るべく、2017年11月22日に締結された協定。なお、協定の正式名称は「福島ロボットテストフィールドを活用したロボット・ドローンの実証等に関する国立研究開発法人新エネルギー・産業技術総合開発機構と福島県との協力協定」。
5.問い合わせ先
(本ニュースリリースの内容についての問い合わせ先)
NEDO ロボット・AI部 担当:宮本、桐生、永松 TEL:024-521-8047
NEC コーポレートコミュニケーション部 担当:野本、大戸
(株)NTTデータ 広報部 担当:黒澤、近藤
(株)日立製作所 ブランド・コミュニケーション本部 広報・IR部 担当:小泉
(株)NTTドコモ 第一法人営業部 第五営業担当
(株)ゼンリン 総合企画室 広報担当
(その他NEDO事業についての一般的な問い合わせ先)
NEDO 広報部 担当:佐藤、坂本、藤本

