
2020-03-10 国立天文台
2020年3月9日 (ハワイ現地時間)
すばる望遠鏡に搭載される超広視野多天体分光器 PFS (Prime Focus Spectrograph) の一部である「メトロロジカメラシステム」の試験観測が2019年8月に実施されました。今回のメトロロジカメラシステムの試験観測は、2018年6月と10月の試験観測に引き続くもので、これまでの結果を踏まえ装置の一部やソフトウェア等を改善して行われました。その結果、視野全体で均質で良質な像が得られ、ドーム建物内の空気の乱れの影響をほとんど受けずに像の位置測定ができました。また観測時に実際に行うファイバー配置を模してソフトウェアを動かすことができました。試験観測後は、PFS に必要な全装置が揃った状態での試験観測に向け、準備が現在進められています。
PFS は2022年の科学運用開始を目指し開発が進められている超広視野ファイバー多天体分光器です。すばる望遠鏡の次世代基幹観測装置の一つとして、東京大学国際高等研究所カブリ数物連携宇宙研究機構 (Kavli IPMU) を中心とした国際チームにより製作が進められています。すでに稼働中の超広視野主焦点カメラ Hyper Suprime-Cam (HSC) とともに、すばる望遠鏡の 8.2 メートル口径による高い集光力と主焦点の広い視野というユニークな特長を最大限に活かして、観測効率を飛躍的に向上させます。HSC と PFS の両方を使って大規模なサーベイ観測を行う SuMIRe 計画 (「すみれ」: Subaru Measurement of Images and Redshifts) では、遠方銀河と星の広域巨大統計から、ダークマター、ダークエネルギーの正体や、多種多様な銀河の形成、進化の物理過程に迫ります。
PFS では、望遠鏡やドームのあちこちに設置された複数のサブシステムが望遠鏡と連携して動作し観測を遂行します (図1)。すばる望遠鏡主焦点の直径 1.3 度角の視野内には約 2400 本の光ファイバーが配置され、各々の光ファイバーは 10 数マイクロメートルという精度で観測したい星や銀河へ向けられます。そして、捉えらえられた多数の天体からの光は、「青」「赤」「近赤外」3つのカメラからなる分光器システムへ送られ、380 ナノメートルから 1260 ナノメートルの波長範囲におよぶスペクトルとして一度に分光観測されます。光ファイバーを天体に向ける際、1本1本のファイバーの位置を正確かつ素早く測定する「メトロロジカメラ」が重要な役割を果たします。

図1: PFS の全体像の模式図。メトロロジカメラはすばる望遠鏡のカセグレン焦点に取り付けられ、2400 本のファイバーが取り付けられる主焦点装置へ向けられます。(クレジット:PFS プロジェクト/カブリ数物連携宇宙研究機構/国立天文台)
メトロロジカメラは台湾・中央研究院天文及天体物理研究所 (Academia Sinica, Institute of Astronomy and Astrophysics – ASIAA) が開発を担当し、すばる望遠鏡のカセグレン焦点に取り付けられるカメラです。50 メガピクセルの CMOS 検出器を使って1枚の露出で全てのファイバーの位置を測ることが可能です。天体を観測するときには主焦点から分光器へ光を運びますが、ファイバーの配置をするときには、反対に分光器の側からファイバーを照らし、メトロロジカメラの向けられている焦点面側の端を光らせて、それをメトロロジカメラで撮像し位置を測ります。この位置情報をもとにそれぞれのファイバーが目標位置からどれだけ離れているかを割り出し、ファイバー位置制御装置に伝え、ファイバーをその分だけ動かすという仕組みです。
2018年4月にハワイへ到着したメトロロジカメラは、まずハワイ観測所の山麓施設やマウナケア山頂施設で単体での調整試験が行われたのち、6月にすばる望遠鏡に取り付けられ基本動作確認が行われました。10月に再び望遠鏡に取り付けた際は、主焦点部分に特別な光源を取り付けて試験を行いました。この光源はピンホールマスクシステムと呼ばれ、直径 129 マイクロメートルの丸い穴 (ピンホール) が多数規則正しく開けられたプレート (ピンホールマスク) に背後から光を当てるもので、メトロロジカメラから見ると小さな点状の光源が多数並んでいるように見えます (図2)。実際の PFS では、約 2400 本のファイバーに分光器側から光を入れて主焦点面側の先端を光らせますが、それとよく似た状態を作り出してメトロロジカメラに必要な光学性能が出ているかを確認するのが狙いです。
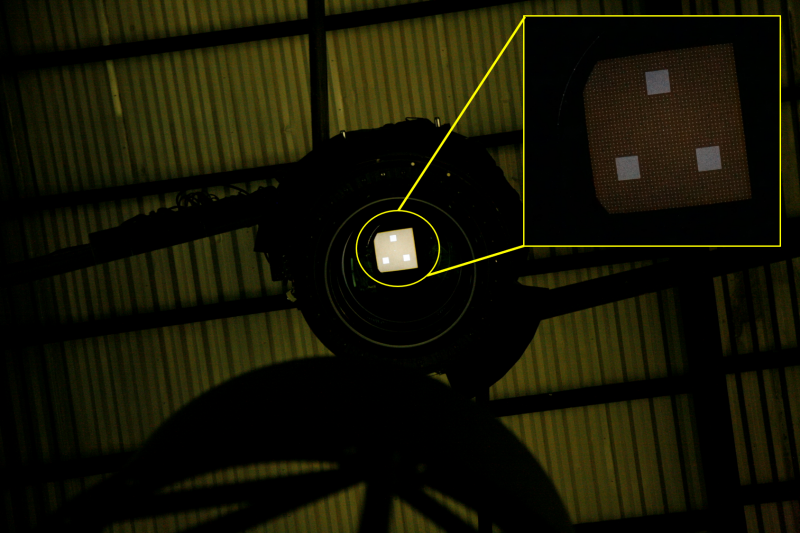
図2: ピンホールマスクに背後から光を当てている様子。色が濃く見える3箇所の四角い領域は、ピンホールの密度が周囲よりも高い場所。(クレジット:PFS プロジェクト)
画像データを見ながら光学調整を進めた結果、メトロロジカメラの主鏡を支持する構造を改造して安定性を高める必要が明らかになり、2019年8月の試験観測では、支持構造をアップグレードした上で再度同様の試験を行いました。また、ファイバー端を模したピンホール像の検出および位置測定ソフトウェアも望遠鏡に装置を載せた状態で安定して機能するよう改善し、試験観測を行いました。その結果、メトロロジカメラの視野全体で、均質で良質なピンホール像が得ることができました (図3)。また、視野の場所に依らず図3が示すのと同じような大きさの像が得られたことに加え、像の大きさや形は望遠鏡を傾けても安定していました。
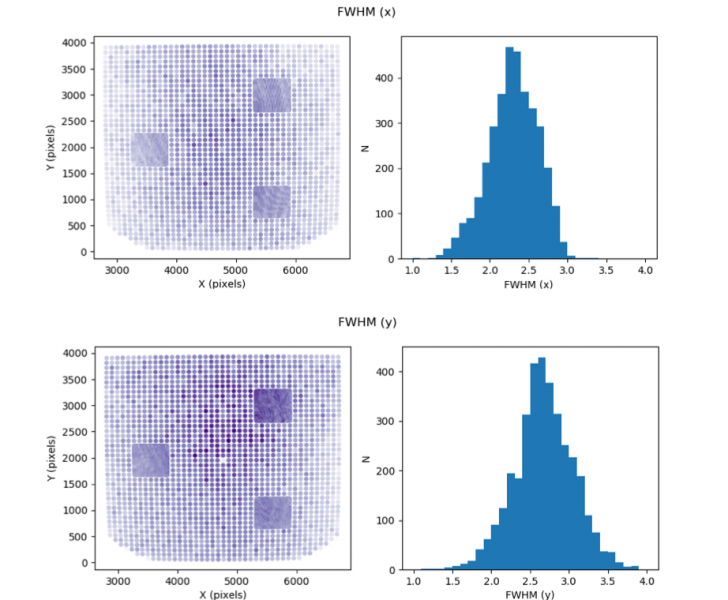
図3: 左図は、測定されたピンホール像の大きさを表す FWHM の値を、メトロロジカメラ CMOS 検出器上の各々の像の場所で色の濃さとして表現したもの。FWHM は半値幅 (はんちはば) といって像の明るさがピークの半分になる部分の大きさのこと。上段左図が X 軸方向、下段左図が Y 軸方向の FWHM をそれぞれ示します。右図は検出器全体にわたって集めた FWHM の値を測定分布 (ヒストグラム) で示しています。上段、下段がそれぞれ X 軸、Y 軸方向の FWHM についてのもの。右図の測定分布は X 軸方向、Y 軸方向とも殆ど同じ値 (2.5 近辺) に位置しており、像の形はほぼ円形になっていることが分かります。(クレジット:PFS プロジェクト)
さらに、ピンホール像の位置測定が、観測と同じ環境の下でどの位安定しているかも試験しました。望遠鏡の上部にあるピンホールから出た光は、ドームの建物内を巡る空気の流れにより望遠鏡の下部にあるメトロロジカメラに届くまでに擾乱を受けて、その分カメラ上での位置が動いてしまいます。この余計な像の動きがどのくらいの大きさか、ファイバーの位置測定に影響しない大きさに収まっているかを測定しました (図4)。
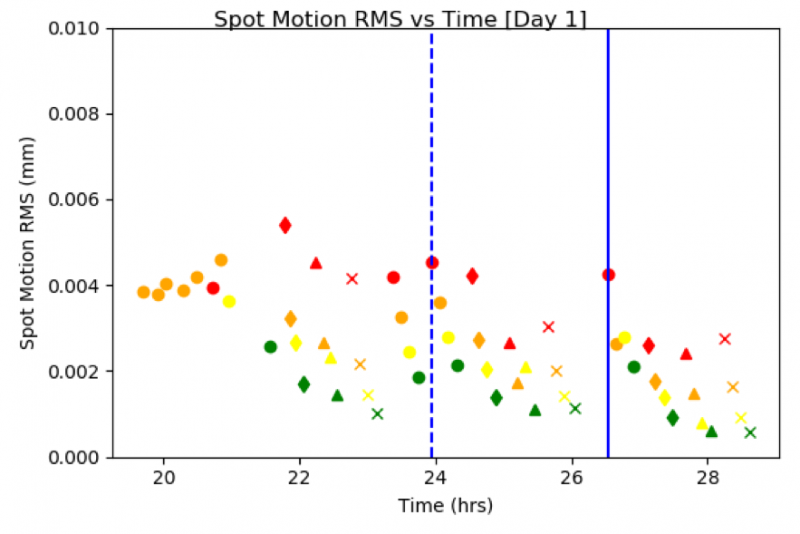
図4: ピンホール像の測定位置の動きが望遠鏡の傾きや露出時間により変化する様子。縦軸は像の動き具合を示す値。一つ一つのデータ点は各 50 枚の画像から算出した二乗平均平方根の値で、測定結果のばらつきを示しています。横軸は測定が行われた時間。データ点の色の違いは露出時間の違い (赤:0.5 秒、橙:1秒、黄:2秒、緑:5秒)、形の違いは望遠鏡の傾きの違いを示す。横軸で示す試験観測時間内に、望遠鏡の傾きを変えながら、複数の露出時間でピンホール像を撮影しデータを取った。露出時間1秒以上 (橙:1秒、黄:2秒、緑:5秒) では、ピンホール像の動きが、像の動きを評価する二乗平均平方根の値で性能の要求値 0.004 ミリメートル以下に収まっています。(クレジット:PFS プロジェクト)
このピンホールマスクシステムを使った試験のもう一つの大きな目的は、装置制御ソフトウェアの開発と試験です。ピンホールの像を実際のファイバー先端の像に見立て、画像データからその場所を正確に測定するのに加え、その情報を観測時と同じように保存し、ファイバー位置制御装置に伝達して解析するメカニズムや、位置制御の様子がつぶさに見て取れるように解析結果を表示するツールの実装や実証を行いました。今回の試験で浮かび上がった問題点や未達な部分を今後精査し、ファイバー位置制御装置が主焦点装置部分の一部として実際望遠鏡に搭載された際にスムーズに試験が進められるようソフトウェアの開発も進める予定です。
メトロロジカメラ以外の開発も、着実に進んでいます。米国・カリフォルニア工科大学で行われてきたファイバー位置制御装置の開発はほぼ完了し、主焦点装置への組み上げと組み上げ後の試験が台湾で ASIAA のチームにより進められています。フランスで組み上げが行われている分光器システムは、1台目の可視カメラがすばる望遠鏡に輸送され、再組み上げを完了しました。ブラジルで作業が進められているファイバーケーブルとともに、主焦点装置がすばる望遠鏡に届くと、いよいよ夜空に浮かぶ実際の天体からの光をファイバーへ導入しての「試験観測」が始められます。この大きなマイルストーンに向かい、各チームと連携しつつ準備を現在進めています。
")
