ゲルアクチュエーターを搭載した腰サポートウエアを開発")
軽量、低消費電力で、拘束感が少ない動作サポートを実現
2020-01-14 新エネルギー・産業技術総合開発機構,信州大学
NEDOは、「次世代人工知能・ロボット中核技術開発」に取り組んでおり、今般、NEDOと信州大学は、ポリ塩化ビニール(PVC)ゲルアクチュエーターを搭載した腰サポートウエアを開発しました。開発した腰サポートウエアは、重量が2kg程度と軽量であり、低消費電力です。また、PVCゲルアクチュエーター自体が弾力的に変形しやすいため、装着時の拘束感が少なく、装着者へのストレスが少ないサポートウエアです。
今後、更なる軽量化や高出力化、安全性の確保のための研究開発を行い、2021年までに製品化を目指します。
なお、本成果は1月16日、17日に、新宿ルミネゼロで開催される「NEDO AI & ROBOT NEXT シンポジウム」で展示されます。

図1 腰サポートウエアの外観
1.概要
国内外で深刻な高齢化が指摘されている昨今、介護や物流現場などにおける動作支援に貢献できるウエアラブルロボットを社会や個人に広く普及させることが急務です。従来の電磁モーターを搭載したサポートウエアは、重い、硬い、駆動音が大きい、拘束感が強い、などが課題となっています。
そこで、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)と国立大学法人信州大学は、「次世代人工知能・ロボット中核技術開発」事業において、ポリ塩化ビニール(PVC)ゲルアクチュエーターを搭載した腰サポートウエアを開発しました。駆動源としてPVCゲルアクチュエーターを採用することで、重量が2kg程度と、従来のサポートウエアに比べて軽量であるほか、低消費電力、柔軟、軽量、静音など、人との親和性が高いウエアラブルロボットを実現できます。
2.今回の成果
【1】腰サポートウエアへ搭載するための「PVCゲルアクチュエーター」の開発
従来の電場応答型の高分子アクチュエーターの一つである誘電エラストマーアクチュエーター※1では、誘電エラストマーを陽極・陰極で挟み電圧を加えると陽極と陰極の間に静電引力(マクスウェル応力)が働き、誘電エラストマーは膜厚方向に収縮し、面内方向に膨張します(図2(a))。このマクスウェル応力は、陽極・陰極間の距離(正・負電荷同士の距離)が近いほど強く働きます。一方、PVCゲルに電圧を加えると、陽極近傍のゲル内部に、通常時のゲルよりも低弾性率で高い静電容量を持つ薄い層(ゲル膜厚より非常に薄い層)が出現し、この薄い層にマクスウェル応力が働くことで陽極に沿ってクリープ変形※2すると考えられています。これにより、同程度の膜厚をもつ誘電エラストマーアクチュエーターに比べ10分の1以下の低い電圧で、駆動すると考えられています(図2(b))。
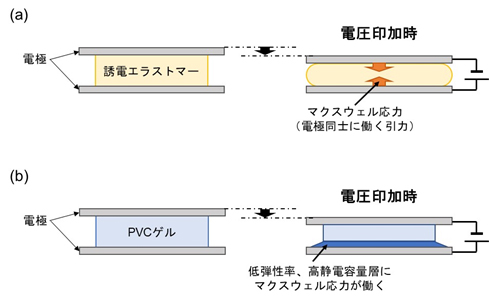
図2 (a)誘電エラストマーの変形概略図 と、(b)PVCゲルのクリープ変形挙動
今回使用しているPVCゲルアクチュエーターは、陽極として金属メッシュを用い、PVCゲルがメッシュの空隙に入り込む挙動を利用することで、膜厚方向に10%以上収縮します。
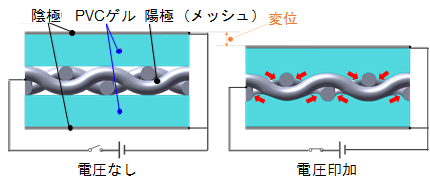
図3 PVCゲルアクチュエーターの構造の断面イメージと変形イメージ
【2】腰サポートウエアの開発
上述のPVCゲルアクチュエーターを駆動源として用いて、持ち上げ動作を補助する腰サポートウエアを開発しました。開発した腰サポートウエアは、積層したPVCゲルアクチュエーターを直径約6cm、長さ約45cmの筐体に格納し、本体に取付けられた上肢・下肢ハーネスを肩・大腿部にそれぞれ装着して使用します。アクチュエーターの駆動に伴い、アクチュエーター下部に接続されている下肢ハーネスを引き上げることで上肢と下肢間に引張力が発生し、能動的に腰の負担を軽減することが出来ます。また、全体の重量は2kgと軽量で、低消費電力です。加えて、PVCゲルアクチュエーター自体が弾力的に変形しやすいため、人の動作を拘束しにくい特徴があります。
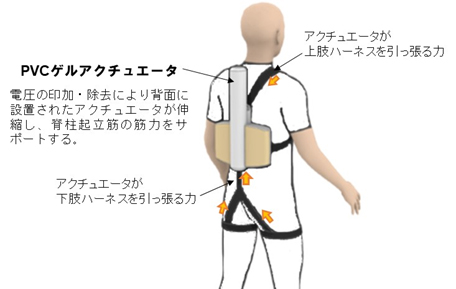
図4 腰サポートウエアの上肢・下肢ハーネスに働く力
3.今後の予定
今後、更なる軽量化や高出力化、安全性の確保のための研究開発を進め、2021年までに腰サポートウエアの製品化を目指します。
【注釈】
- ※1 誘電エラストマーアクチュエーター
- 電場に応答するエラストマー(ゴムなどの弾性を有する高分子材料)を利用したアクチュエーター。電場を加えることで大きな歪み(数百%)を示し、エネルギー効率が高い一方、駆動電圧に数千Vの高電圧を必要とする。
- ※2 クリープ変形
- PVCゲルに電圧を加えた際に陽極の表面に沿ってアメーバのように這い広がる挙動。
4.問い合わせ先
(本ニュースリリースの内容についての問い合わせ先)
NEDO ロボット・AI部 担当:渡邊、木下
信州大学 繊維学部 担当:橋本
(その他NEDO事業についての一般的な問い合わせ先)
NEDO 広報部 担当:佐藤、坂本、中里

