を用いた トラックの隊列走行の公道実証を開始します")
2019/01/08 国土交通省,経済産業省
| 国土交通省及び経済産業省は「高度な自動走行システムの社会実装に向けた研究開発・実証事業」の一環として、本年1月22日から新東名高速道路において後続車無人システム(後続車有人状態)のトラック隊列走行の公道実証を実施します。 |
国土交通省及び経済産業省では、「未来投資戦略2018(平成30年6月15日閣議決定)」に基づき、移動革命の実現にむけた主な取組の一つである高速道路でのトラック隊列走行について、
早ければ2022年の商業化に向けて、2020年に高速道路(新東名)での後続車無人での隊列走行を実現することを目指しています。
これまで、後続車無人システムの開発を進めテストコースでの検証を重ねてまいりましたが、
本年1月22日から2月28日までの間、新東名高速道路において、トラック隊列走行の後続車無人システム(後続車有人状態)の公道実証を開始※1することとしました。
今年度の公道実証では、最大3台のトラックが、時速70kmで車間距離約10mの車群を組んで走行いたします※2。安全確保の観点から、全ての車両にテストコースで経験を積んだドライバーが乗車いたします。
実走行環境において、開発中の後続車無人システムの実現に向けて必要となる機能※3が設計通り作動することの確認を行うとともに、トラック隊列が周辺走行車両の乗員からどのように認識されるか(被視認性、印象等)、トラック隊列が周辺走行車両の挙動(追い越し等)に及ぼす影響等も確認いたします。
<実証実験に関するお問い合わせ先(取材を含む)>
事務局 TEL:0120-130-833(お問い合わせ時間:8:00~16:00)
※1これまで公道で実施していた実証実験は後続車有人システムです。
※2車間距離維持機能や先行車追従機能等を搭載することにより、時速70kmで車間距離約10mでの走行を実現します。
※3今回実施する先行車に追従して車線変更する機能を搭載したトラックによる公道実証は国内初です。
お問い合わせ先
- 国土交通省自動車局技術政策課 久保、藤倉
添付資料
報道発表資料(PDF形式)
別紙1(PDF形式)
別紙1
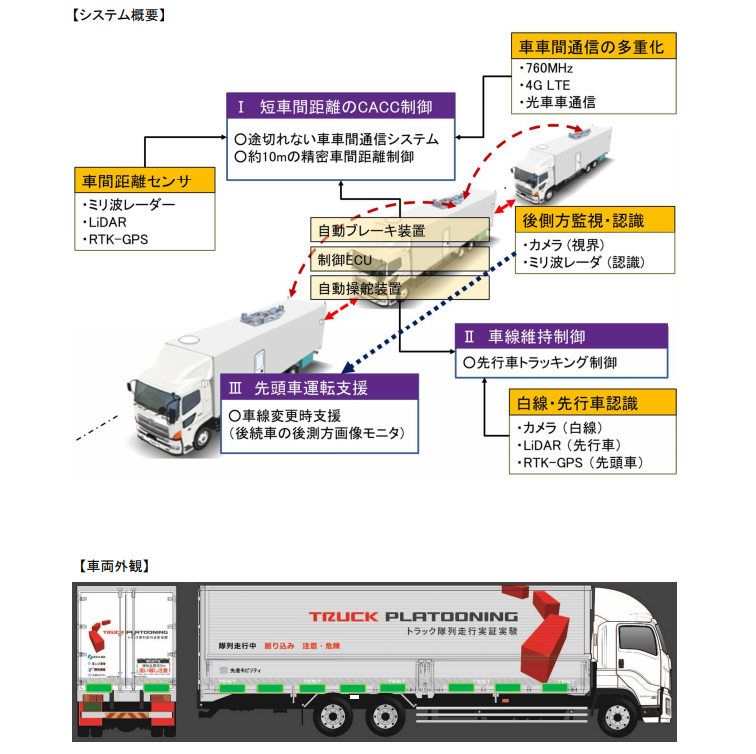
今年度の公道実証で使用する実証実験車両システム説明
■後続車無人システム ドライバーによる手動運転を行う先頭車の後方に 1 台または複数台の無人のトラックを短車間距離 (最長 10m)で、電子的に連結して走行するシステム。電子的な連結とは、車両間を通信等により接続 するもので、物理的な連結が存在しない。
■CACC システム(協調型車間距離維持支援システム) 通信で先行車の制御情報を受信し、加減速を自動で行い、車間距離を一定に保つ機能。
■先行車トラッキングシステム GPS トラッキング制御技術※1、LiDAR トラッキング制御技術※2 により、先頭車または先行車への追 従走行、車線維持、車線変更を行う機能。
■先頭車運転支援システム 後続車の後側方のカメラ画像やミリ波レーダーによる検知情報を先頭車に表示し、先頭車が車線変 更する際のドライバーの視界を支援する機能。
後続車無人システムは、一人の運転手が複数台の無人※3 のトラックを運行し、もって高効率の運行 を実現することで、トラックのドライバー不足対策に貢献するとともに、短車間距離による空気抵抗低減 と交通容量増大による効果により省エネルギーが期待できる。
※1. 白線未検出時又は車線変更時、RTK-GPS により先頭車と自車の横偏差を検出し先頭車をトラッキ ングする技術。
※2. 白線未検出時又は車線変更時、LiDAR により先行車と自車の横偏差を検出し、先行車をトラッキン グ制御する技術。
※3. 今年度の実証実験は、安全確保の観点から、全ての車両にテストコースで経験を積んだドライバー が乗車。
別紙2(PDF形式)


