アリロボットの群れを「飼いならす」
2019-01-29 京都大学
土畑重人 農学研究科助教、藤澤隆介 九州工業大学准教授、一ノ瀬元喜 静岡大学准教授の研究グループは、アリの集団採餌を模倣した群ロボットシステムを用いることで、自己組織化を伴う複雑適応システムが進化する際に、システムを補助する性質がシステムそのものに先立って生じるという、一見矛盾した規則が存在することを発見しました。
本研究は、複雑でありながらも適応性を兼ね備えるという、生物システムが共通して示す特性が、進化の過程でどのように生じたのかについての新たな理論枠組を提示するものです。また、本研究で用いた手法は、ロボットシステムを生物学の研究補助ツールとしてではなく、研究対象そのものとして活用するもので、「ロボット行動学」とも呼ぶべき、分野横断型研究の新たなモデルケースとなることが期待されます。
本研究成果は、2019年1月18日に、国際学術誌「Communications Biology」に掲載されました。

図:本研究で用いた群ロボットシステムARGOS
書誌情報
【DOI】https://doi.org/10.1038/s42003-018-0276-3
【KURENAIアクセスURL】http://hdl.handle.net/2433/236120
Ryusuke Fujisawa, Genki Ichinose & Shigeto Dobata (2019). Regulatory mechanism predates the evolution of self-organizing capacity in simulated ant-like robots. Communications Biology, 2:25.
詳しい研究内容について
―生物の複雑適応システムの進化機序に新たな規則を発見―概要
京都大学大学院農学研究科 土畑重人 助教、九州工業大学大学院情報工学研究院 藤澤隆介 准教授、静岡大 学学術院工学領域 一ノ瀬元喜 准教授は、アリの集団採餌を模倣した群ロボットシステムを用いることで、自 己組織化を伴う複雑適応システムが進化する際に、システムを補助する性質がシステムそのものに先立って生 じるという、一見矛盾した規則が存在することを発見しました。
本研究は、複雑でありながらも適応性を兼ね備えるという、生物システムが共通して示す特性が進化の過程 でどのように生じたのかについての新規な理論枠組を提示するものです。また、本研究で用いた手法は、ロボ ットシステムを生物学の研究補助ツールとしてではなく、研究対象そのものとして活用するというものです。 これは「ロボット行動学」とも呼ぶべき、分野横断型研究の新たなモデルケースとなることが期待されます。
本研究成果は、2019 年 1 月 18 日に、 英国のオンライン科学誌 「Communications Biology」に掲載されま した。
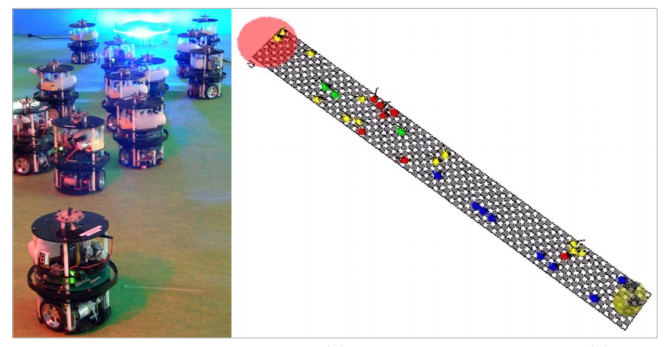
図:本研究で用いた群ロボットシステム ARGOS(左)と、計算機上でのシミュレーションの様子(右)
1.背景
生物の進化にみられる顕著な特徴の一つとして、時間とともに 「複雑さ」が増していくという点を挙げるこ とができます。複雑さとは、生物システムの構成要素数(たとえば DNA の総配列長)や、それら要素間の関 係性 (たとえば細胞間相互作用のパターン)の多さのことです。複雑さの増大は多くの場合、その生物システ ムの環境適応性と関連しており、このことは「複雑適応システム」として知られています。
複雑適応システムの典型例として、私たちは社会性昆虫に着目した研究を行ってきました。 アリやミツバ チに代表される社会性昆虫のコロニーは、採餌や巣の構築にあたって、構成要素である個体単独では不可能な 規模の適応的な集団行動を行うことができ、「超個体」とも形容されます。システム全体を俯瞰することので きない個体からなる集団が、どのように複雑適応システムを実現しているのでしょうか。これを理解するため には、現在のシステムとその適応進化のプロセスとを併せて分析する必要がありますが、両者を統合した研究 はまだ十分であるとはいえません。
2.研究手法・成果
複雑適応システム進化の問題に挑むべく、私たちはユニークなアプローチを採用しました。それは、社会性 昆虫を模した群ロボットを分析対象にするというものです。群ロボットは、群れをつくる生物の特性を工学的 に実装するバイオミメティクス (生物模倣工学)の主要な成果であり、自己組織化システムの持つ柔軟性や撹 乱への頑健性をその強みとしています。私たちが用いた群ロボットシステム 「ARGOS」は、研究チームのひと り藤澤が 2007 年以来開発を続けているもので、アリやシロアリで見られる道しるべフェロモンによる巣仲間 での情報共有を介した集団採餌を模しています(図)。
実際のロボットの開発にあたって、道しるべフェロモンに対する個体の反応アルゴリズムをロボットに実装 しただけでは、群ロボットは採餌をうまく行えないという問題が生じました。ロボットたちはフェロモン上に 集中するため渋滞や衝突が発生し、餌を巣に持ち帰る効率が低下してしまうのです。藤澤は、フェロモンに対 する反応に加えて、ロボットが衝突したときにどのようにふるまうかという「交通規則」を導入することで、 この問題を解決しました。巣から餌に向かう(往路)個体と餌から巣に帰る(復路)個体とが衝突した場合、 往路個体が後退して復路個体に 「道を譲る」ことで、餌を持つ復路個体が効率的に巣までたどり着けるように なり、結果として適応的かつ自己組織化能をもつ集団採餌が実現したのです。
この工学的な着想は、実際の生物とは独立になされたものですが、私たちは、ロボットの「「交通規則」が一 部のアリで報告された現象と非常に似通っていることに着目しました。大規模な採餌行列を形成するアリでは、 フェロモン上で個体が衝突したとき、復路個体が優先される形で渋滞が回避されるのです。ふたつのシステム の共通点は、根幹となるシステム (道しるべフェロモン利用)だけではなく、補助的な調節メカニズム (交通 規則)が必要とされる、という部分です。私たちは、このようなシステムの階層性が、複雑適応システムの進 化を理解する上でのカギになると考えました。
それでは、根幹となるシステムと調節メカニズムは、どのような順序で進化するのでしょうか。これを明ら かにするべく、私たちは群ロボットを生物のように適応進化させてみることにしました。すなわち、道しるべ フェロモンの認識能力、調節メカニズムをコードする遺伝子を考え、両者を持たない状態の群ロボットの集団 に 「突然変異」を起こし、集団採餌をより効率的に行った群ロボットを選抜していくということです。実際の 群ロボットでこれを行うことは不可能ではありませんが時間的 経済的に多大な労力を要するため、私たちは 開発された群ロボットをコンピュータ上で忠実に再現したシミュレーションを行うという手法を採用しまし た (図)。シミュレーションは、進化の過程をすべて記録しておくことができるため、群ロボットの 「系譜」や 進化の順序を明らかにする上でも有利です。
シミュレーションの結果は意外なものでした。調節メカニズムはその機能を根幹システムに依存しているの で、直感的には根幹システムが進化的に先に現れ、調節メカニズムがそれに続くと思われました。しかし実際 には、大多数の試行で調節メカニズムのほうが先に進化したのです。具体的に群ロボットの 「系譜」をたどる と、根幹システムも調節システムも持たない群ロボットから、突然変異によってまず調節システムだけを持つ 群ロボットが進化し、その群ロボットの中から根幹システムをあわせ持つ群ロボットが現れていました。
「根幹システムを持たない状態での調節メカニズム」というのは禅問答のようですが、そのような性質は進 化生物学において、木村資生が提唱した中立進化理論を用いて理解することができます(参考図)。たとえ集 団採餌の効率性を変えることはなくても、突然変異は常に生じているために、将来的に調節メカニズムとして 機能しうる変異体は集団の中に現れ、一定の確率で存続することができます。その変異体の系譜の上で、根幹 システムの遺伝子に変異が生じることにより、複雑適応システムを実現する群ロボットが進化するのです (こ の過程は、進化遺伝学において「確率的トンネリング」として知られています)。私たちの進化シミュレーシ ョンにおいてはさらに、調節メカニズムを持たず根幹システムのみを持つ群ロボットが、双方を持たない状態 よりも採餌効率が低いという「適応度の谷間」が生じていることも、意外な進化機序を下支えしていました。 「適応度の谷間」は、ちょうどロボット開発で問題になったのと同じ、フェロモン上でのロボットの渋滞によ って生じるものです。まとめると、中立進化によって生じた調節メカニズムが、複雑適応システムの進化の中 間段階における「適応度の谷間」の迂回に貢献していた、ということになります。
複雑適応システムにおいて、根幹システムと調節メカニズムというシステムの階層性は一般的に見られる性 質です。私たちの今回の研究成果は、生物の適応的な複雑さの進化が、適応進化と中立進化とが複合したダイ ナミックなプロセスとして理解できるという新たな理論枠組を提供するものです。
3.波及効果、今後の予定
本研究成果は、生物が示す複雑適応システムの成立を理解するにあたって、自己組織化研究と進化生物学と を橋渡しすることが持つ意義を明確にするものです。本研究は、ロボット工学 計算科学 行動生態学という、 異なる分野の研究者の協働によって実現されました。工学と生物学との従来の共同研究は、ロボット工学にお けるバイオミメティクスや、生物学における解析技術開発の形で行われてきました。本研究はそれらとは異な り、ロボットシステムを生物学における基礎研究の研究対象そのものとして活用するというものです。もちろ んロボットと生物とは、その成り立ちが大きく異なりますが、両者にはシステムとして共通する部分がありま す。「ロボットを創って生物を理解する」という構成論的アプローチは、生物研究だけではなしえない新たな 気づきを私たちに与えてくれるとともに、新たな工学的応用にも貢献することでしょう。「ロボット行動学」 とも呼ぶべき本研究のアプロ―チは、分野横断型研究のさらなる促進につながることが期待されます。
4.研究プロジェクトについて
本研究は科研費 (若手研究 (B) 15K18609 研究代表者 土畑重人、基盤研究 (A) 17H01249 研究代 表者 松野文俊 京都大学大学院工学研究科 教授)および平成 29 年度 公益財団法人浜松科学技術研究振興会 村田基金研究助成(研究代表者 一ノ瀬元喜)の助成を受けて行われました。
<研究者のコメント>
この研究は、生物にインスパイアされたロボット工学者とロボットにインスパイアされた生物学者との共同 作業の成果です。群れにおける 「交通規則」は、社会性昆虫の進化と群ロボットの開発において独立に獲得さ れた収斂現象といえます。このことは、生物の理解に人工システムが役立ちうることを端的に示しています。 手段としてだけでなく、好奇心に基づく分野横断型研究が科学技術の裾野を拡げることに役立てば幸いです。
<論文タイトルと著者>
タイトル: Regulatory mechanism predates the evolution of self-organizing capacity in simulated ant-like robots (計算機上のアリ模倣ロボット群において、調節メカニズムは自己組織化能の進化に先立つ)
著者: Ryusuke Fujisawa#*, Genki Ichinose#, Shigeto Dobata#* (#共同筆頭著者,*責任著者)
掲載誌 :Communications Biology DOI: 10.1038/s42003-018-0276-3
<参考図>
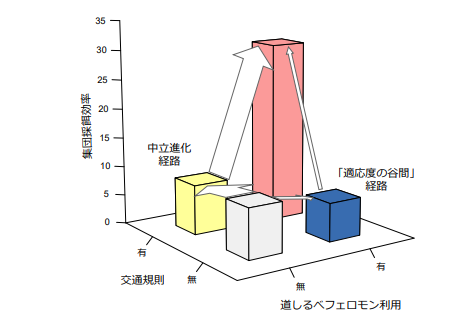
群ロボットの進化を表す「適応度地形図」。根幹システムである道しるべフェロモン利用と調節メカニズムで ある交通規則の有無が集団採餌効率にどのように影響したかを示している。矢印は群ロボットの集団がたどっ た進化経路で、大多数 (50 回中 45 回)のシミュレーション試行で集団は中立進化経路 (調節メカニズムが根 幹システムに先立つ)をたどって進化した。

