2018-01-31 国立研究開発法人新エネルギー・産業技術総合開発機構,福島県
―試験方法や試験環境の妥当性を検証―
本試験では、試験用水槽設備でロボットを航行させ、再現したダム壁面の傷の点検プロセスや河床の洗掘把握の点検プロセスに沿ったロボットの性能評価の試験方法と、試験に必要となるテストピースの仕様や配置方法などの試験環境の妥当性の検証を実施しました。
NEDOは、本試験で取得できたデータや今後の取り組みを通じて、ダムや河川の点検に使用するロボットの性能評価基準の策定に貢献します。

1.概要
現在、ダムなどの社会インフラの老朽化が急速に進むことが懸念され、これらを維持管理する費用は年々増加傾向にあり、少子高齢化による人材不足も年々深刻化しています。また、これらの課題解決に向けたインフラ点検支援ロボットの技術開発が国内でも活発に実施されているものの、インフラ点検ロボットの性能を測るモノサシが明らかになっていません。そのため、技術開発の促進および普及のためにはインフラ点検ロボットの性能を測るモノサシを規定し、性能を測る試験方法を含めた性能評価基準などの策定が喫緊の課題となっています。
このような背景のもと、NEDOは、「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト※1」において、物流やインフラ点検および災害対応分野などでの活用が期待される各種ロボット(無人航空機、陸上ロボット、水中ロボットなど)の性能を実現場に導入する前に評価するための、性能項目や性能評価のための試験方法、および試験に使用する計測システムなどをまとめた日本初の性能評価基準の開発に取り組んでいます。
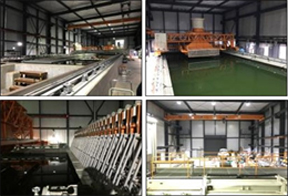
今般、NEDOは、ダムや河川の点検における水中点検用の遠隔操縦ロボットの性能評価基準策定に向け、パナソニック株式会社、朝日航洋株式会社、パナソニックシステムソリューションズジャパン株式会社とともに、東亜建設工業株式会社と国立大学法人東京大学の試験用水槽施設を用いて、水中点検ロボットの性能評価のための試験方法などを検証するための試験を昨年12月に実施しました。
本試験では、試験用水槽設備でロボットを航行させ、再現したダム壁面の傷の点検プロセスや河床の洗掘把握の点検プロセスに沿ったロボットの性能評価の試験方法と、試験に必要となるテストピースの仕様や配置方法などの試験環境の妥当性を検証し、ダム点検と河川点検におけるロボットの活用に向けた性能評価基準策定に必要となる各種データを取得することができました。
NEDOは、今後も性能評価基準の策定に貢献すべく準備を進めるとともに、2030年に7,000億円規模と期待されている社会インフラの維持管理・更新のための水中点検ロボットを含むロボット関連市場の創出にも寄与します。また、昨年11月22日にNEDOと福島県が締結した「福島ロボットテストフィールドを活用したロボット・ドローンの実証等に関する協力協定※2」の取り組みの一環として、性能評価基準に基づく試験が「福島ロボットテストフィールド※3」の屋内水槽試験棟で実施できるよう、本試験から得られた知見は福島県へ提供し、一部福島ロボットテストフィールドの設計に反映される予定です。

2.試験の内容
水中ロボットによるダムの堤体やゲートおよび継ぎ目開きの概査点検と精査点検プロセスやそこで必要となるテストピースの妥当性を検証するために、水中ロボットを航行させ、準備から点検作業終了までの所要時間と点検時の濁度環境のデータを取得するとともに、取得した画像データと鮮明化された画像データから点検結果を判定しました。




水中点検用のフロートロボットでの移動計測時の直進性や旋回性と点検精度を評価するために、実験水槽の底面にテストピースを配置しロボットを航行させ、準備から点検作業終了までの所要時間と点検時のデータを取得するとともに取得した点検結果を判定しました。



【用語解説】
- ※1 ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト
- プロジェクト期間は2017年度~2021年度の5年間で、2017年度予算は33億円。
- ※2 福島ロボットテストフィールドを活用したロボット・ドローンの実証等に関する協力協定
- NEDOと福島県の連携を強化し、「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」において福島ロボットテストフィールドを積極的に活用することでロボット・ドローンの実用化を加速させ、福島イノベーション・コースト構想の推進とロボット・ドローン産業の活性化を図るべく、2017年11月22日に締結した協定。
- ※3 福島ロボットテストフィールド
- 物流、インフラ点検、大規模災害などに活用が期待される無人航空機、災害対応ロボット、水中探査ロボットといった陸・海・空のフィールドロボットを主対象に、実際の使用環境を拠点内で再現しながら、研究開発、実証試験、性能評価、操縦訓練を行うことができる研究開発拠点。福島県南相馬市および浪江町で2018年度から順次開所予定。
3.問い合わせ先
(本ニュースリリースの内容についての問い合わせ先)
NEDO ロボット・AI部 担当:宮本、山中、永松
(福島ロボットテストフィールドについての問い合わせ先)
福島県商工労働部ロボット産業推進室 担当:北島
(その他NEDO事業についての一般的な問い合わせ先)
NEDO 広報部 担当:髙津佐、坂本、藤本
で触媒反応の収率を予測")
