2022-12-01 産業技術総合研究所
ポイント
- センサーでロボットハンドのつかむ・放す動作を電圧の変化として検出
- イオン導電性高分子センサーでロボットハンドの屈曲の度合いやつかみ損ねを検出し、柔らかい物をつかむ動作を解析
- これまで困難であった食品などの柔らかい物をつかみ、パック詰めするロボットの実用化に貢献

ソフトロボットハンドの動きとイオン導電性高分子センサーのセンシング電圧
概要
国立研究開発法人 産業技術総合研究所(以下「産総研」という)ナノ材料研究部門 杉野 卓司 研究グループ長、物部 浩達 主任研究員、堀内 哲也 主任研究員は、立命館大学理工学部ロボティクス学科 平井 慎一 教授、松野 孝博 助教らと共同で、イオン導電性高分子センサーをソフトロボットハンドの屈曲センサーとして用いると、ソフトロボットハンドが物をつかむ際の指を曲げ伸ばす「動き」と指の屈曲度合いの「形状」の両方が検出でき、さらに、つかんだ物を落としたことも判断できることを見いだしました。
従来の圧電式フレキシブルセンサーは、ソフトロボットハンドの指を曲げ伸ばして物をつかんだり離したりする「動き」しか検出できず、物をつかんで静止した後、どの程度指が屈曲しているかという「形状」を定量的に検出するのは困難でした。これに対し、イオン導電性高分子センサーは、指の「動き」だけでなく、静止後の指の「形状」もあわせて検出することが可能です。そのため、ソフトロボットハンドがつかんだ物の大きさや、正しくつかみ続けられているかの情報を得ることができます。さらに、つかんだ物を落とした際に起こるハンドの微細な振動も検出して解析することで落下を判断できるようになりました。
人件費の上昇や人手不足の解消のため、例えば食品業界では、食品パッキング作業の省力化が求められています。ソフトロボットハンドによる物をつかむ作業の自動化では、つかむ作業の成否の判断が課題となっていました。今回、イオン導電性高分子センサーの特性を使って、この課題が解決しました。
この技術の詳細は、2023年2月1日~3日に東京ビッグサイトで開催される「nano tech 2023」にオンライン展示(2022年12月1日~2023年2月28日)されます。
動画1 柔らかなアクチュエータとセンサー
開発の社会的背景
少子高齢化による労働力不足を補い持続可能な産業発展を進めていく手段の一つとして、近年、ロボット技術が注目されています。例えば、われわれが日々食べる弁当への食材パッキングは、人手に頼っているため、人手不足が生産性の低下に直結しています。食材は一般に柔らかく、形状も多様であるため、従来の硬いロボットハンドではなくエラストマー等でできた柔らかいソフトロボットハンドでつかむ必要があります。
その際、ソフトロボットハンドの動きを検出する触覚センサー自身もつかむ際の変形を妨げない柔らかな素材である必要があります。柔らかい触覚センサーとしては、圧電性高分子を用いた圧電式センサーや誘電エラストマーを用いた静電容量式センサーが知られています。しかし、圧電式センサーは、平板状センサーの形そのものではなく形の変化の速度を検出するため、ソフトロボットハンドの動きは検出できますが、動きが止まると伸びているのか屈曲しているのか区別できません。また、静電容量式センサーはセンサーの長さ方向の伸長により静電容量の変化を検出するため、変形の大きいソフトロボットハンドの外表面に取り付ける必要があるという制約がありました。さらに、いずれも、ソフトロボットハンドから物が滑り落ちても、それを検出して判断することができませんでした。そこで、物をつかむ作業の成否判断可能なセンサーの開発が求められていました。
研究の経緯
産総研では、これまで、ハプティクス分野での応用を目指してイオン導電性高分子アクチュエータの開発に取り組んできました。イオン導電性高分子アクチュエータはイオン性電解質ゲルフィルムの両側に金やカーボンナノチューブなどの導電性電極を貼り合わせた三層構造を有しており、電圧を両電極間に加えると屈曲変形するという特徴があります。一方、同じイオン導電性高分子アクチュエータを外部から指などで押して屈曲変形させると、アクチュエータ内に数ミリボルト程度の電圧が発生することからフレキシブルセンサーとしても応用可能であると考えていました。立命館大学では、食品をつかむ作業に応用可能なシリコンゴムなどでできたソフトロボットハンドの設計と制御に関する研究を行っています。学校法人立命館と産総研は包括連携を結び、社会課題を解決する相互のシーズを共同で育てる「シーズ・スプラウト・プログラム」を実施し、その中で高分子ソフトセンサーによるソフトロボットハンドについて共同研究を行ってきました。
研究の内容
本研究では、燃料電池等に使用されるイオン電解質ゲル膜の両面に金を化学メッキしたイオン導電性高分子貴金属接合体(IPMC: Ionic Polymer-Metal Composite)をフッ素樹脂フィルム中に封止することでイオン導電性高分子センサーであるIPMCセンサーを作製しました。そして、これを空気の圧力で駆動するソフトロボットハンドの指に取り付け、センサーとしての機能を調べました。IPMCセンサーではソフトロボットハンドのつかむ動きに伴う屈曲変形により、センサー内部に含まれる陽イオン濃度分布に偏りが生じ、両電極間に電圧(センシング電圧)が生じます(図1)。この電圧をモニターすることで、ソフトロボットハンドの状態(動きや形状)をどれくらいの感度で検出できるのかを調べました。さらに、圧電式センサーおよび静電容量式センサーでも同様のソフトロボットハンドに取り付けて実験を行い、センサーとしての性能を比較しました。
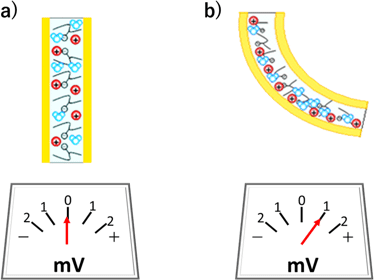
図1 イオン導電性高分子センサー(IPMCセンサー)が屈曲変形により発電する様子
a)屈曲変形前:IPMCセンサー内部の陽イオンはセンサー素子全体に均一に分布
b)屈曲変形時:屈曲時の圧力で陽イオンの分布に偏りが生じ、電位差が生じる
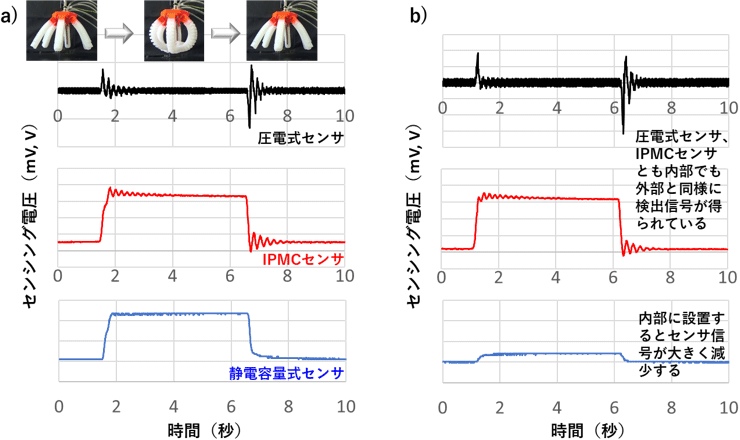
図2 把持時の圧電式センサー、静電容量式センサーとIPMCセンサーの発生電圧の比較
a)ソフトロボットハンドの外部に設置 b)ソフトロボットハンドの内部に設置
その結果を図2に示しました。圧電式センサーではソフトロボットハンドのつかむ動作に伴う屈曲変形を検出できますが、つかんだ状態、すなわち屈曲状態を保持しているかどうか判別できません。一方、静電容量式センサーでは、つかんだ状態は検出可能ですが、つかむ動作が開始される瞬間のソフトロボットハンドの振れは検出することができません。それに対して、IPMCセンサーはソフトロボットハンドの屈曲や振れを高感度に検出すると同時に、つかんだ状態も検出できることが分かりました。すなわち、圧電式センサーと静電容量式センサーの両方の良い面を併せ持つセンサーであるといえます(図2a)。
ソフトロボットハンドは食品にじかに触れることを考えると、これらフレキシブルセンサーはソフトロボットハンド内部に埋め込まれている方が衛生的です。そこで、各フレキシブルセンサーをソフトロボットハンドの内部に埋め込んだ際の感度を比較しました(図2b)。その結果、IPMCセンサーはソフトロボットハンドの内部でもつかんだ状態を検出できることが実証できました。一方、静電容量式センサーをソフトロボットハンド内部に設置した場合、屈曲変形時に伴う静電容量式センサーの伸長が小さくなるため、変形に対する感度が大きく低下してしまいます。
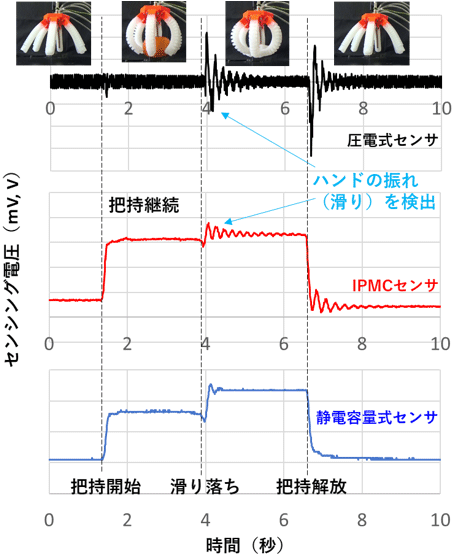
図3 みかんを把持した時と把持していたみかんが滑り落ちた時の各種フレキシブルセンサーの電圧信号変化の比較
(センサーはソフトロボットハンドの外部に設置)
次に、ソフトロボットハンドが物をつかみ、その後、物がソフトロボットハンドから滑り落ちた時のセンサー信号変化を調べました(図3)。その結果、IPMCセンサーと静電容量式センサーでは、ソフトロボットハンドの屈曲程度に応じて検出電圧が変化するため、つかんだ物体の大きさを知ることができることが分かりました。さらに、IPMCセンサーは物体が滑り落ちた直後のソフトロボットハンドの細かな振動を検出でき、このセンシング電圧信号を解析することでつかんだ物の落下も検出できることが明らかになりました。ソフトロボットハンドが物をつかむ動作が検出できたことで食品包装の自動化の実現のめどがつきました。
今後の予定
今後はIPMCセンサーをはじめとするイオン導電性高分子センサーを改良することで、信号の検出能力を向上し、検出電圧からつかんだ物体のサイズや質量を推定することを目指します。これにより、ソフトロボットハンドのセンシング情報をロボットアームにフィードバックすることでつかんだ物体の仕分けやつかめなかった時につかみ直すことができるようになります。この技術は、食品のパッキングや商品の集荷作業の省人化に貢献すると考えています。
用語解説
- イオン導電性高分子センサー
- 外部からの応力で内部のイオンが移動して生じる電圧により応力やひずみを検出するセンサー。柔軟性のある高分子材料で成形されている。
- 圧電式フレキシブルセンサー
- 外部からの応力によりセンサー内に電圧が発生し、その電圧を検出することで応力によるひずみ等を検出できる柔らかいセンサーです。
- エラストマー
- ゴムのように弾性を持つ柔らかい高分子材料の総称。
- 圧電性高分子
- 外部から応力をかけて変形させた際に電圧が発生する高分子、または、電圧を印加した際に振動や変形する高分子。
- 誘電エラストマー
- 電圧を印加すると大きなひずみを生じて変形する弾性体で、シリコンやアクリルゴムなどの高分子材料。
- 静電容量式センサー
- 静電容量変化をモニターすることにより厚み、あるいは、長さ変化を検出するセンサー。平板状の誘電エラストマーの両面に伸縮性の電極を取り付けることで、その厚みに応じて電極間の静電容量が変化する静電容量式センサーを作ることができます。
- アクチュエータ
- さまざまな外部エネルギーを機械的なエネルギーに変換する装置の総称。代表的な物としてはモーターがあります。
- ハプティクス
- 人に外部から振動などを与えることにより触感を与える技術。
お問い合わせ
産業技術総合研究所

