
を低コストで制御するAIを開発")
自動運転などにおける複雑なタスクをベクトルに変換しメモリー消費を低減
2022-03-08 大阪大学,科学技術振興機構
ポイント
- サイバーフィジカルシステム(CPS:Cyber Physical System)では、ロボットなどの物理システムが複雑かつ高度なタスクを自律的に実行できる制御機能を構築することが不可欠
- これまでの制御機能を学習する人工知能(AI)技術は、特にタスクの数が膨大である場合、メモリー消費などのコストの観点から現実的ではないという課題が存在
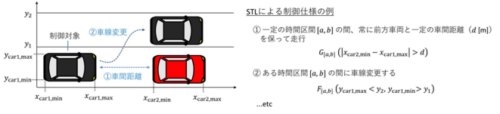
- 本研究では、CPSで想定される複雑なタスク仕様を信号時相論理(STL:Signal Temporal Logic)で記述し、それらをベクトルに変換する機械学習技術(STL2vec)を新たに構築することで、多種多様なタスクの下での制御機能を統一的かつ省メモリーで学習することが可能に
- 数値実験では自律型移動ロボットの制御問題を考え、約200種類のSTLタスクを一度に学習するシミュレーションを行い、従来法に比べメモリー消費量を1/24に削減することに成功
- 自動運転を代表とするCPSにおけるさまざまな応用分野への展開が期待
大阪大学 大学院工学研究科の大学院生の橋本 航さん(博士後期課程)、橋本 和宗 助教、高井 重昌 教授らの研究グループは、ロボットやドローン、自動車などのさまざまな物理システムを計算機(情報システム)で管理し制御するサイバーフィジカルシステム(CPS:Cyber Physical System)において、多種多様かつ複雑なタスクを実行するための制御機能を低コストで学習する新たな人工知能(AI)技術を開発しました。
近年、自動運転に代表されるように、さまざまなタスク(前方の車に追従する、車線変更するなど)を実行するための制御機能をAIにより行うための機械学習手法に関する研究が盛んに行われています。しかし、自動運転などで想定されるタスクの数は膨大であることから、それぞれのタスクに対し学習モデルを1つずつ用意し構築することは、メモリー消費などといったコストの観点から好ましくありません。そのため、これまで提案されてきた学習方法は、特にタスクの数が多い場合には現実的ではないといった課題がありました。
今回、橋本助教らの研究グループは、CPSにおいて想定される複雑なタスク仕様を信号時相論理(STL:Signal Temporal Logic)で記述し、それらをベクトルに変換する技術(STL2vec)を新たに構築することで、多種多様なタスクの下での制御機能を統一的かつ省メモリーで学習することを可能としました。今回提案した技術により、CPSにおける幅広い分野に対し、従来法に比べより柔軟性の高い実用的な設計方法の確立への展開が期待されます。
本研究成果は、「IEEE Robotics and Automation Letters」に、2022年3月8日(火)(日本時間)に公開されました。
本研究は、科学技術振興機構(JST) 戦略的創造研究推進事業 CREST「数学・数理科学と情報科学の連携・融合による情報活用基盤の創出と社会課題解決に向けた展開」研究領域(研究総括:上田 修功)における研究課題「AI集約的サイバーフィジカルシステムの形式的解析設計手法」(JPMJCR2012、研究代表者:末永 幸平)、科研費(若手研究)「物理モデルとセンサデータに基づく省リソースな制御と通信方策の設計」(21K14184、研究代表者:橋本 和宗)の助成を受けたものです。
<論文タイトル>
- “STL2vec: Signal Temporal Logic Embeddings for Control Synthesis with Recurrent Neural Networks”
- DOI:10.1109/LRA.2022.3155197
<お問い合わせ先>
<研究に関すること>
橋本 和宗(ハシモト カズムネ)
大阪大学 大学院工学研究科 助教
<JST事業に関すること>
舘澤 博子(タテサワ ヒロコ)
科学技術振興機構 戦略研究推進部 ICTグループ
<報道担当>
大阪大学 工学研究科 総務課 評価・広報係
科学技術振興機構 広報課

")
")