2019-09-11 京都大学
鄧昊洋 情報学研究科博士後期課程学生、大塚敏之 同教授は、実時間最適制御(モデル予測制御)を並列計算によって実行する高速アルゴリズムの開発に成功しました。
制約条件の下で最適な動きを求める問題は最適制御問題と呼ばれ、自動運転や電力系統の安定化、化学反応の効率化など、あらゆる対象を巧みに動かす制御に応用できます。特に、時々刻々の状況に応じて最適制御問題を実時間で解きなおしながら制御を行うモデル予測制御は、応用範囲の広い方法として活発に研究されています。しかし、複雑な問題だと、解くための計算が膨大で時間がかかってしまい、モデル予測制御の実現が困難でした。
本研究で提案した手法では、未来の動きをいくつかの断片に分解し、断片ごとの最適化を並列計算によって同時に実行します。分解のしかたを工夫することで、全体の最適化を達成しつつ計算の大幅な高速化に成功しました。この研究成果によって、近年発展しているマルチコアプロセッサの性能を最大限活かすことができ、また、安価なプロセッサを複数使用して計算効率を上げることも可能になります。
本研究成果は、2019年8月30日に、国際学術誌「Automatica」のオンライン版に掲載されました。

図:本研究で提案した手法
書誌情報
【DOI】 https://doi.org/10.1016/j.automatica.2019.108560
【KURENAIアクセスURL】 http://hdl.handle.net/2433/243949
Haoyang Deng, Toshiyuki Ohtsuka (2019). A parallel Newton-type method for nonlinear model predictive control. Automatica, 109:108560.
詳しい研究内容について
並列計算を活用した実時間最適制御の高速アルゴリズムを開発
概要
京都大学大学院情報学研究科 鄧昊洋 博士後期課程学生と 大塚敏之 同教授は、実時間最適制御(モデル予測制 御)を並列計算によって実行する高速アルゴリズムの開発に成功しました。
制約条件の下で最適な動きを求める問題は最適制御問題と呼ばれ、自動運転や電力系統の安定化、化学反応の 効率化など、あらゆる対象を巧みに動かす制御に応用できます。とくに、時々刻々の状況に応じて最適制御問題 を実時間で解きなおしながら制御を行うモデル予測制御は、応用範囲の広い方法として活発に研究されています。 しかし、複雑な問題だと、解くための計算が膨大で時間がかかってしまい、モデル予測制御の実現が困難でした。
本研究で提案した手法では、未来の動きをいくつかの断片に分解し、断片ごとの最適化を並列計算によって同 時に実行します。分解のしかたを工夫することで、全体の最適化を達成しつつ計算の大幅な高速化に成功しまし た。この研究成果によって、近年発展しているマルチコアプロセッサの性能を最大限活かすことができ、また、 安価なプロセッサを複数使用して計算効率を上げることも可能になります。
本研究成果は、2019 年 8 月 30 日に国際学術誌「Automatica」のオンライン版に掲載されました。
1.背景
温度制御、アンチロックブレーキシステム(ABS)、ロケット着陸などさまざまな制御システムが社会のいろ いろなところで使われています。制約条件の下で最適な動きを求める問題は最適制御問題と呼ばれ、あらゆる対 象を巧みに動かす制御に応用できます。とくに、時々刻々の状況に応じて最適制御問題を実時間で解きなおしな がら制御を行うモデル予測制御は最も使われている先端制御方法です。例えば、自動運転や電力系統の安定化、 化学反応の効率化、人工膵臓などにうまく適用されています。
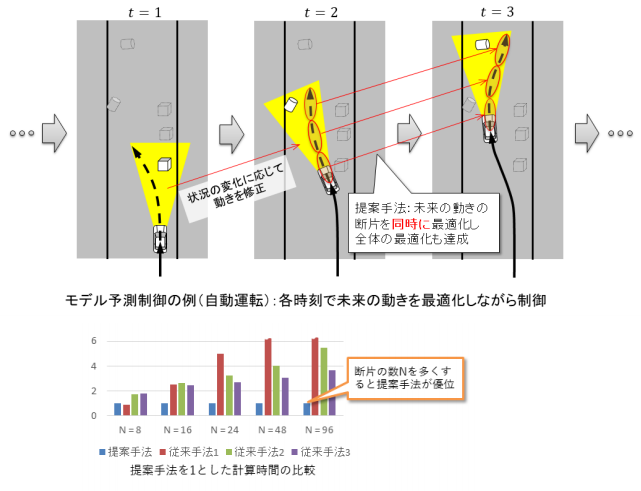
モデル予測制御により、プロセス産業の大幅な利 益改善が可能になり、自動運転車の安全で快適な経路を見つけることができます。 モデル予測制御(図1) は、制御対象のモデルに基づいて制御対象の未来の動きを予測・最適化します。ただ し、未来の動きの最適化には多くの計算が必要です。 既存の方法により実時間で最適化するためには、高速で高 性能なコンピューターが必要です。また、ロボットや電力ネットワークなどの複雑なシステムではさらに計算が 複雑になるため、モデル予測制御の実現が困難でした。
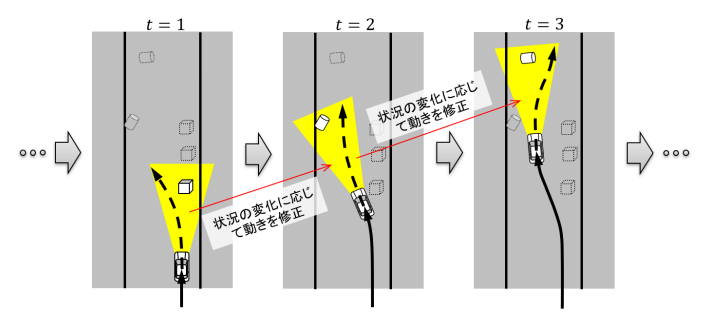
図1:モデル予測制御の例(自動運転):各時刻で未来の動きを最適化しながら制御
2.研究手法・成果
モデル予測制御では、有限の未来の期間にわたる最適化を各時刻で実行する必要があります。しかし、長い未 来の動きは初期状態に敏感であるため、未来の動きを全体的に最適化することは困難です。提案手法では、未来 の動きをいくつかの断片に分解し、断片ごとの最適化を並列計算によって同時に実行します(図2)。その際、隣 接する断片の影響を適切に考慮できるよう分解のしかたを工夫することで、全体の最適化を達成しつつ計算の大 幅な高速化に成功しました(図3)。一般に、断片の数を増やすほど計算時間は増えますが、提案手法の場合は複 数の断片を同時に最適化できるため、計算時間の増加率が従来手法の 1/4 未満となりました。
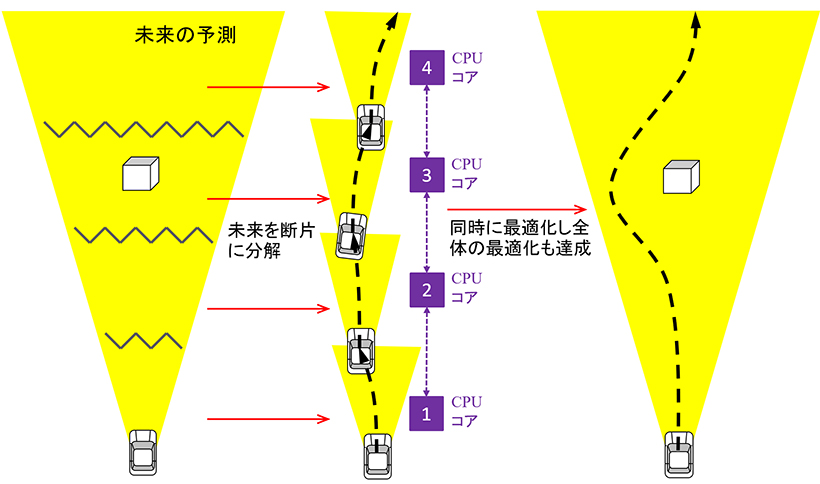 図2:提案手法
図2:提案手法
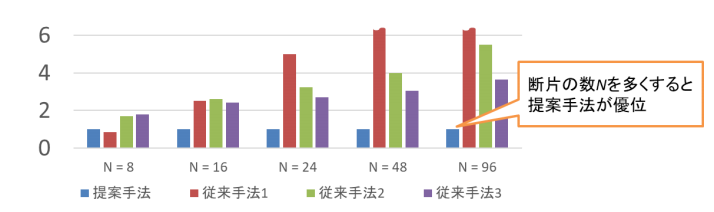
図3:提案手法を 1 とした計算時間の比較
3.波及効果、今後の予定
モデル予測制御は、石油精製、製鋼、人工膵臓、航空宇宙などの分野に広く使われています。この研究成果に よって、近年発展しているマルチコアプロセッサの性能を最大限活かすことができ、また、安価なプロセッサを 複数使用して計算効率を上げることも可能になります。モデル予測制御の実装コストの削減が期待されます。 さ らに、自動運転、ロボット制御、電力ネットワーク制御などの新しい分野への応用が可能になります。今後の予 定としては、産業用アプリケーションのためのソフトウェアを開発することが挙げられます。
4.研究プロジェクトについて
本研究の一部は、日本学術振興会(JSPS)科研費 15H02257 の助成を受けたものです。
<研究者のコメント>
私たちが研究している方法は多くの制御システムに対して適用されているため、あらゆる進歩が大きな経済利益 や新しい分野への応用の開拓に繋がります。 この研究の一番面白いところは、得られる研究成果がより良い社会、 よりインテリジェントで経済的な社会を作ることに繋がる点です。この面白さが,私たちのやる気や研究への情 熱の源となっています。
<論文タイトルと著者>
タイトル: A parallel Newton-type method for nonlinear model predictive control(非線形モデル予測制御のた めの並列ニュートン法)
著 者:Haoyang Deng & Toshiyuki Ohtsuka
掲 載 誌:Automatica DOI: 10.1016/j.automatica.2019.108560

