
(株)YOODSが4月に販売開始
2019-03-28 新エネルギー・産業技術総合開発機構,株式会社YOODS
NEDOと(株)YOODS(ユーズ)は、小型・軽量・高精度でありながら、低価格を実現したロボットアーム用3Dビジョンセンサー「YCAM3D」を開発しました。独自の小型高出力プロジェクターの搭載と、ステレオ位相シフト方式の採用により、対象物の位置情報などを高精度で取得でき、同方式の3Dビジョンセンサーでは世界最小・最軽量を実現しました。
同センサーは、ロボットアームに直接取り付けることで、カメラとロボット間の座標変換のキャリブレーション(補正)が容易となり、部品の位置と姿勢を高精度に認識してピッキングすることが可能になります。小型・軽量のため、ロボットアームと一体化したビジョンシステムを設計でき、ワークトレイなど周囲との干渉を少なくすることができます。
(株)YOODSは、今回開発した「YCAM3D」を4月1日に販売開始する予定です。ロボットアームの“目”となる3Dビジョンセンサーの製品化を通じて、ロボットアームの活用が拡大されることで、自動車や電子機器、物流など幅広い分野での生産性向上につながることが期待できます。

図1 3Dビジョンセンサー「YCAM3D」(写真)
1.概要
国立研究開発法人 新エネルギー・産業技術総合開発機構(NEDO)は、「ロボット活用型市場化適用技術開発プロジェクト※1」において、従来からロボットの活用が期待されつつも、技術や価格、周辺環境などの課題により導入が進まなかった領域(ロボット未活用領域)に対し、これらの課題を解決することでロボットの導入促進を図ることを目的とした技術開発に取り組んでいます。
このようなロボット未活用領域の中で、産業用ロボットと3Dカメラを組み合わせたロボットピッキング(多種多様な部品の位置や姿勢を1つずつ認識し、ロボットハンドでつかんで次工程へ運ぶ作業)は、労働人口の減少に対して日本が生産性を維持・強化していくために必須の自動化システムです。国内においてもこのような視点からロボットピッキングの事業化を目指す試みがなされてきています。しかしながら、従来の3Dビジョンセンサーはロボットの上部の天井などに設置する方式が主流であり、広い視野を一度に計測可能とするための性能が必要で、かつ大型になっています。そのため高価で広い設置スペースが必要となり、その適用先が限定的となっているのが実情です。
そこで、NEDOと株式会社YOODSは、小型・軽量・高精度でありながら、低価格を実現したロボットアーム用3Dビジョンセンサー「YCAM3D」を開発しました。独自の小型高出力プロジェクターの搭載と、ステレオ位相シフト方式※2の採用により、対象物の位置情報などを高精度で取得でき、同方式の3Dビジョンセンサーでは世界最小・最軽量※3を実現しました。
同センサーは、ロボットアームに直接取り付けることで、カメラとロボット間の座標変換のキャリブレーション(補正)が容易となり、部品の位置と姿勢を高精度に認識してピッキングすることが可能になります。小型・軽量のため、ロボットアームと一体化したビジョンシステムを設計でき、ワークトレイなど周囲との干渉を少なくすることができます。
特に高精度な位置決めが必要な小型部品ピッキングや搬送位置決めの作業では、新たにビジョンセンサーを搭載したロボットの導入により、従来は人が担っていた作業領域の自動化への活路を開きます。
(株)YOODSは、今回開発した「YCAM3D」を4月1日に販売開始する予定です。ロボットアームの“目”となる3Dビジョンセンサーの製品化を通じて、ロボットアームの活用が拡大されることで、自動車や電子機器、物流など幅広い分野での生産性向上につながることが期待できます。
(株)YOODSでは、初年度に国内で100台程度、中国を中心とした海外で50台程度の「YCAM3D」の販売を目指しています。
2.3Dビジョンセンサー「YCAM3D」の特長
(1)小型・軽量・高精度でありながら低価格
独自開発の小型高出力プロジェクターを搭載し、ピッキング対象物を高精度に認識できるステレオ位相シフト方式を搭載した3Dビジョンセンサーです。ステレオ位相シフト方式はプロジェクターを使ってさまざまなパターンを対象物に投影してピクセルの濃淡変化から3次元位置を求めることで高精度な3Dデータを得ることができます。また、ロボットアームに搭載するハンドアイ方式として、対象物に近づいて撮影することで、検出対象物の姿勢を±0.1mm以内の精度で認識することが可能であるとともに、データ量が少ない低解像度のカメラを使えることで、認識時間の高速化(従来の位相シフト方式3Dビジョンセンサーと比べて1/4~1/16)と低価格化(従来の位相シフト方式3Dビジョンセンサーと比べて約1/2)を実現します。
(2)優れた耐環境性
ロボットアームに搭載して常に動き回る3Dビジョンセンサーは、振動や衝撃、粉塵などの使用環境において、十分な信頼性が求められます。「YCAM3D」は、これまで困難だった任意のパターンを投影可能なプロジェクターを搭載しながらも、ロボットアームに搭載されるという実使用環境に耐えられるにように、耐振動・耐衝撃・防水・防塵に重点を置いた設計となっています。
(3)ROS(Robot Operating System)※4対応により容易なアプリケーション開発が可能
3Dビジョンセンサーの活用により各種ロボットが利用できる分野を広げるため、ROSをベースとしたビジョンシステム開発ツールおよびロボットビジョンプラットフォーム「RoVI※5」(オープンソースソフトウェア)をWebで公開※6しています。「RoVI」と「YCAM3D」を組み合わせることにより、ロボットシステムインテグレーターは、今後公開されるサンプルコードをベースにして、自由に短時間でアプリケーションを開発することができます。
また(株)YOODSは、今後、小型の専用ビジョンコントローラを開発し、パソコンを介さなくても使えるようにするなど、利便性も向上させていく予定です。
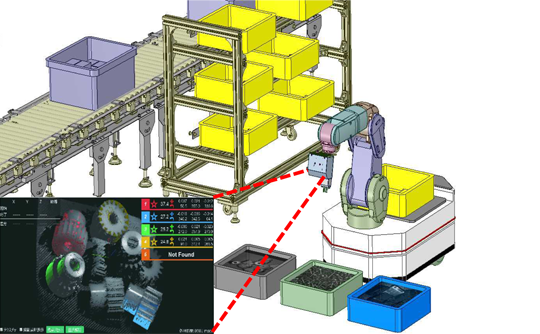
図2 「YCAM3D」のピッキング作業での活用イメージ
「YCAM3D」の主な仕様は、以下の通りです。
表 YCAM3Dの主な仕様
| ステレオカメラ | 130(33)万画素モノクロカメラ(CMOSセンサー:EV76C560ABT) 基線長(BL):80mm ワーキングディスタンス(WD):300、500mm(モデル選択による) 視野:120×80~330×270mm (レンズ選択による) カメラパラメータ:プリインストール(Genicam XMLのヘッダ部から読出し可能) |
| 対応システム | Linux+ROS+OpenCV、Windows10 出力データRAW画像 Rectify画像(ROSのみ) 点群(PLY形式、単位mm) |
| 3D計算方式 | 位相シフト(7bitグレイコード+90°位相ズレ画像4枚) |
| プロジェクター | TI/DLP4500(8bit、120Hz)、青LED、0.6W出力 |
| データ伝送方式 | GigE Vision |
| 冷却方式 | 自然空冷(ファンレス) |
| 使用環境温度 | 40℃以下 |
| 耐振動 | 20Hz~200Hz~20Hz (5分/サイクル)、加速度5G、 XYZ各方向30分(6サイクル) |
| 電源 | DC24V、2.7A |
| 外形寸法、重量 | 115mm(W)×68mm(H)×120mm(D)、920g 取付け:4-M5ネジ、1/4”カメラマウントネジ |
【注釈】
- ※1 ロボット活用型市場化適用技術開発プロジェクト
- テーマ名:汎用ロボットビジョンシステムのプラットフォーム化技術開発
事業期間:2017年度~2019年度 - ※2 ステレオ位相シフト方式
- プロジェクターを用いた3次元計測方法の一種で、位相をずらしながらパターン光を投影することでステレオカメラの視差を求め、対応点の3次元位置を計測する手法。
- ※3 世界最小・最軽量
- 位相シフト方式の3Dビジョンセンサーとして。2019年3月28日現在、(株)YOODS調べ。
- ※4 ROS(Robot Operating System)
- アメリカのスタンフォード大学で開発されたものを起源とし、世界中でロボットを動かすためのプラットフォームとして活用されている。
- ※5 RoVI
- ロボットビジョンシステムの効率的な導入を可能とするソフトウェアで、ハードウェアレイヤーから画像、3D点群処理のソフトウェアレイヤー、ロボットインターフェースレイヤーにより構成される(開発中)。
- ※6 Webで公開
- GitHub上で公開している。URLは、https://github.com/YOODS/rovi
3.問い合わせ先
(本ニュースリリースの内容についての問い合わせ先)
NEDO ロボット・AI部 担当:安田、増田、木村
(株)YOODS 営業グループ 担当:松原、達海
(その他NEDO事業についての一般的な問い合わせ先)
NEDO 広報部 担当:藤本、坂本、佐藤


