2足歩行ロボットなどの限界性能を引き出す手法
2019-11-12 京都大学
片山想太郎 情報学研究科博士後期課程学生、大塚敏之 同教授、トヨタ自動車株式会社らの研究グループは、制御対象に状態やシステムの不連続な変化(離散事象)を伴う実時間最適制御(モデル予測制御)の高速アルゴリズムの開発に成功しました。
時々刻々変化する状況に応じて、最適な未来の動きを実時間で計算しながら制御を行うモデル予測制御は、自動運転や電力システムなど幅広い応用に向けて活発に研究されています。しかし、制御対象のモデルが離散事象を伴うときには場合分けが生じ、計算が膨大になるため、モデル予測制御の実現は困難でした。このような例としては、地面と足の接触に応じて速度が不連続に変化し、運動方程式が切り替わる2足歩行ロボットがあげられます。
本研究で提案したアルゴリズムでは、離散事象を含む最適な予測動作全体の計算と、予測した離散事象の系列の変化に応じた部分的な動作の修正を組み合わせることで、効率的な計算を行うことに成功しました。このアルゴリズムによって、離散事象を伴う制御対象にモデル予測制御を適用することが可能になり、ロボットや化学プロセスなど、身の回りの様々な離散事象を含む制御システムの性能を限界まで引き出すことが可能になります。
本研究成果は、2019年11月5日に、国際学術誌「International Journal of Robust and Nonlinear Control」のオンライン版に掲載されました。

図:本研究の概要図
書誌情報
【DOI】 https://doi.org/10.1002/rnc.4804
【KURENAIアクセスURL】 http://hdl.handle.net/2433/244784
Sotaro Katayama, Masahiro Doi and Toshiyuki Ohtsuka (2019). A moving switching sequence approach for nonlinear model predictive control of switched systems with state‐dependent switches and state jumps. International Journal of Robust and Nonlinear Control.
詳しい研究内容について
不連続な変化を伴う実時間最適制御の高速アルゴリズムの開発に成功
―2 足歩行ロボットなどの限界性能を引き出す手法―
概要
京都大学大学院情報学研究科 片山想太郎 博士後期課程学生 と 大塚敏之 同教授、トヨタ自動車株式会社 らの研究グループは、制御対象に状態やシステムの不連続な変化(離散事象)を伴う実時間最適制御(モデル 予測制御)の高速アルゴリズムの開発に成功しました。
時々刻々変化する状況に応じて、最適な未来の動きを実時間で計算しながら制御を行うモデル予測制御は、 自動運転や電力システムなど幅広い応用に向けて活発に研究されています。しかし、制御対象のモデルが離散 事象を伴うときには場合分けが生じ、計算が膨大になるため、モデル予測制御の実現は困難でした。このよう な例としては、地面と足の接触に応じて速度が不連続に変化し、運動方程式が切り替わる 2 足歩行ロボットが あげられます。
本研究で提案したアルゴリズムでは、離散事象を含む最適な予測動作全体の計算と、予測した離散事象の系 列の変化に応じた部分的な動作の修正を組み合わせることで、効率的な計算を行うことに成功しました。この アルゴリズムによって、離散事象を伴う制御対象にモデル予測制御を適用することが可能になり、ロボットや 化学プロセスなど、身の回りの様々な離散事象を含む制御システムの性能を限界まで引き出すことが可能にな ります。
本研究成果は、2019 年 11 月 5 日に国際学術誌 International Journal of Robust and Nonlinear Control」 のオンライン版に掲載されました。
1.背景
温度制御、アンチロックブレーキシステム(ABS)、ロケット着陸などさまざまな制御システムが社会のいろ いろなところで使われています。制約条件の下で最適な動きを求める問題は最適制御問題と呼ばれ、あらゆる 対象を巧みに動かす制御に応用できます。とくに、時々刻々変化する状況に応じて最適制御問題を実時間で解 きなおしながら制御を行うモデル予測制御は最も使われている先端制御方法です。例えば、自動運転や電力系 統の安定化、化学反応の効率化、人工膵臓などにうまく適用されています。モデル予測制御により、プロセス 産業の大幅な利益改善が可能になり、自動運転車の安全で快適な経路を見つけることができます。
このモデル予測制御 (図 1)は、制御対象のモデルに基づいて制御対象の未来の動きを予測 最適化します。 ただし、モデルに状態やシステムの不連続な変化(離散事象)が伴う時には最適制御問題に場合分けが生じ、 未来の動きの最適化には膨大な計算が必要になります。このような制御システムの例としては化学プロセスや 2足歩行ロボットがあげられます。例えば、2 足歩行ロボットでは、左右の脚と地面、あるいは手と壁の接触 の有無によって運動方程式が切り替わったり、速度が不連続に変化します。このようなシステムでは最適制御 問題の計算が非常に複雑になるため、モデル予測制御の実現が困難でした。
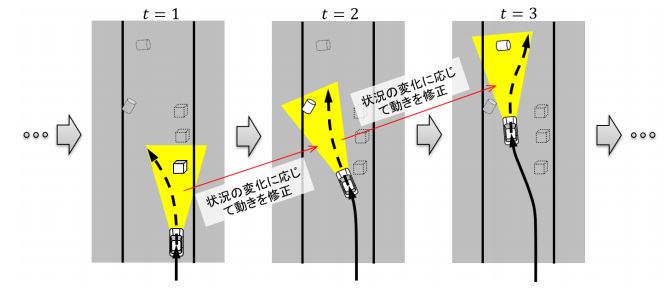
図 1:モデル予測制御の例(自動運転):各時刻で未来の動きを最適化しながら制御
2.研究手法・成果
離散事象を伴うモデル予測制御における最適制御問題 (図 2)では、全ての離散事象の組み合わせについて 最適な動作を計算した上で最もよい組み合わせを選択することが望ましいですが、計算時間の観点から非現実 的です。例えばロボットのようなシステムではそれぞれのシステムのモデル自体が非常に複雑なこともあり、 組み合わせ探索を行う従来の手法ではモデル予測制御の実現は困難でした。
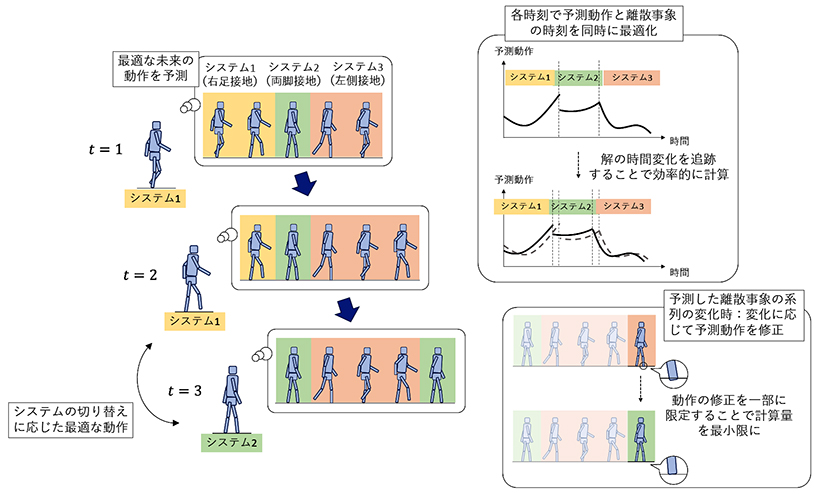
本研究で提案したアルゴリズム (図 3)では、初期状態が少しずつ変化するとき、予測した離散事象の組み 合わせと最適な動作も少しずつ変化していくことに着目しました。このアルゴリズムでは、最適な予測動作と 離散事象の起こる時刻を、その時間変化を追跡することで効率的に計算します。ただし、この計算は予測した 離散事象の系列が一定のもとで行います。この計算に加え、算出した最適な予測動作のもとで、現在予測して いる離散事象の系列に変化があるかどうかを調べます。離散事象の系列の変化を検出したときには、予測動作 の修正を部分的に行い、効率的に動作修正の計算を行います。
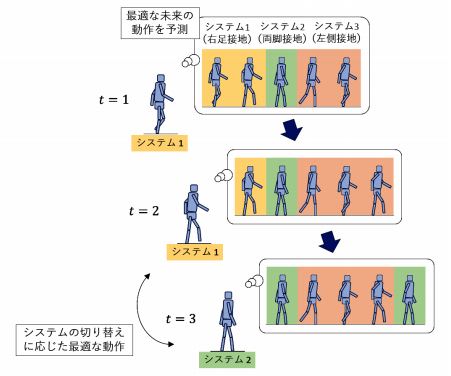
図 2:モードの切り替えを伴うモデル予測制御の例
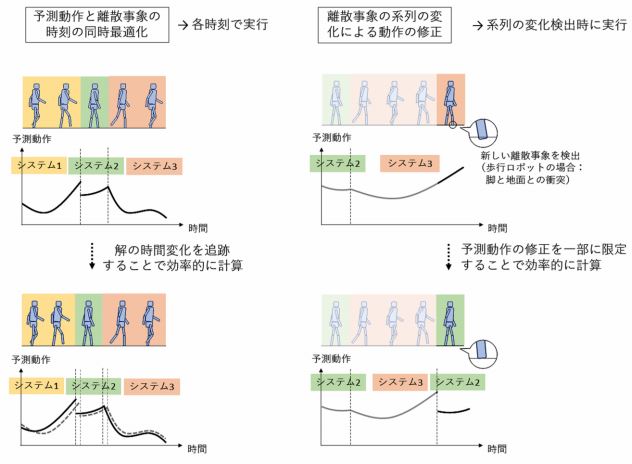
図 3:提案手法
3.波及効果、今後の予定
本研究が提案したアルゴリズムによって、ロボットや化学プロセスなど、身の回りの様々な離散事象を含む 制御システムへモデル予測制御が適用可能になることで、それらの性能を限界まで引き出すことが可能になり ます。特に、地面や壁、モノと触れ合うようなロボットの知能や運動性能を高めることに大きな期待ができま す。今後の予定としては、実際の歩行ロボットへの適用が挙げられます。
4.研究プロジェクトについて
本研究はトヨタ自動車株式会社との共同研究です。また、一部は、日本学術振興会(JSPS)科研費 15H02257 の助成を受けています。
<用語解説>
離散事象:スイッチの切り替えや衝突現象のように、システムの状態を不連続に変化させるできごと
系列:数値や記号、事象など一連の対象を順序立てて並べたもの
<研究者のコメント>
私たちの研究している方法は社会の様々な制御システムの高性能化へ繋がります。さらに、近年特に大きな 発展を遂げている自動車やロボットの知能化に応用されることも期待されています。最先端の研究を行い、こ れまで不可能だと思われていた技術を実現することに大きなやりがいを感じています。
<論文タイトルと著者>
タイトル:A moving switching sequence approach for nonlinear model predictive control of switched systems with state-dependent switches and state jumps(状態依存の切り替えと状態の不連続変 化を伴うシステムに対する非線形モデル予測制御のための移動スイッチ系列アプローチ)
著 者:Sotaro Katayama & Masahiro Doi & Toshiyuki Ohtsuka
掲 載 誌 :International Journal of Robust and Nonlinear Control
DOI :https://doi.org/10.1002/rnc.4804

