2022-04-21 新エネルギー・産業技術総合開発機構
NEDOの「人と共に進化する次世代人工知能に関する技術開発事業」において、北海道大学と関西大学はAIとVRを活用した分子ロボット共創環境の研究開発に取り組んでおり、今般、その環境を利用して分子ロボットの「群れ」を開発し、最大直径30マイクロメートルの物質を効率的に輸送することに世界で初めて成功しました。群れの持つ利点を利用することで、分子ロボット単体ではなし得なかった大きなサイズの積荷を運搬できるようになっただけでなく、大幅な輸送効率の向上を可能にしました。将来的には薬剤の運搬や選択など医療分野のほか、汚染物質の回収など環境保全分野で活躍するマイクロ・ナノマシンとしての応用が期待されます。
本研究成果は、2022年4月20日(米国東部標準時)に米国科学振興協会(AAAS)発行の科学誌「Science Robotics」に掲載されました。
1.概要
分子で構成され環境に応じて動く「分子ロボット」は、医療や環境保全の現場などでマイクロ・ナノマシンとしての応用が期待されています。しかし、分子ロボットを構成する分子部品の設計は生体分子や化学反応に関する高度な知見が必要なことや、実験、観察、完成までの工程に多くの時間を要することから容易ではありませんでした。
このような背景の下、NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)の「人と共に進化する次世代人工知能に関する技術開発事業」において、国立大学法人北海道大学、学校法人関西大学、株式会社分子ロボット総合研究所は2020年から人工知能(AI)とVRを活用した分子ロボット共創環境の研究開発に取り組んできました。この中で確立した環境を活用しながら、このたび北海道大学と関西大学は国立大学法人九州大学、米コロンビア大学、国立大学法人東海国立大学機構名古屋大学の協力を得て、ロボットの群れの形成・離散を遠隔で操作する分子機構を導入した分子ロボットの「群れ」を世界に先駆けて開発し、以下の成果を得ました。
- 数十マイクロメートルというこれまでにない大きさの物質を、指定した場所に輸送することに世界で初めて成功しました。
- 群れ(今回は約100万体の分子ロボットを使用)を利用することで、分子ロボット単体と比べ輸送効率を最大5倍、積荷サイズを10倍に拡大しました。
- 光(紫外光)を照射するだけで物質の輸送先を任意に指定することも可能としました。
本研究成果は、2022年4月20日(米国東部標準時)に米国科学振興協会(AAAS)発行の科学誌「Science Robotics」に掲載されました。

図1 分子ロボットの群れによる物質輸送の概念イメージ(上)
実際に物質を輸送している分子ロボットと積荷の蛍光顕微鏡写真(下)
2.今回の成果
(1)AIとVRの技術を組み込んだ研究開発環境による分子ロボットの開発
NEDOは「人と共に進化する次世代人工知能に関する技術開発事業」を通じて、人と共に進化するAIシステムの社会実装を推進し、日本の労働生産性の向上などに貢献することを目指しています。本事業の研究テーマの一つである「AIとVRを活用した分子ロボット共創環境の研究開発」では、研究開発の現場にAIとVRの技術を組み込んだ共創環境の構築を目指し、以下の技術開発を進めています。
- 深層学習による予測制御技術によりネットワークのタイムラグを補正し、地理的に離れた研究者が分子部品の原子モデルをVR上で共有して同時に操作できるようにします。
- 機械学習により原子間力顕微鏡の従来の解像度を超えて観察できるようにします。
- VR上で実験機器を精密に制御できるようにします。
- VR上で再現した分子構造の挙動を深層学習で追跡し、リアルタイムで解析できるようにします。
上記の技術は、実際の研究開発現場に適用しながら開発を進めてきました。これらの技術を活用することで、分子部品の設計から完成までの工程に多くの時間を要する分子ロボット開発の課題が大幅に改善されました。
(2)世界初、分子ロボットの「群れ」の実働でこれまで実現できなかったタスクに成功
分子ロボットはマイクロスケールやナノスケールまで小型化されてきましたが、その一方で、サイズが小さいために実効的なタスクの遂行には至っていませんでした。本研究では、群れロボット※1工学の考え方に基づいて、分子ロボットを群れとして制御することにより、分子ロボット単体ではこれまで実現できなかったタスクを遂行することに成功しました。
まずモータータンパク質※2(駆動系)、DNA分子コンピュータ※3(制御系)、フォトクロミック色素※4(センサー系)を化学的な手法で組み上げ、単体で直径25ナノメートル、全長5マイクロメートル(髪の毛の20分の1)程度のサイズの分子ロボットを開発しました。フォトクロミック色素には、可視光や紫外光で群れの形成・解離を遠隔操作するため、感光性分子であるアゾベンゼンを用いました。また、分子ロボットに輸送させるプラスチック製のマイクロビーズ(直径数マイクロメートル~数十マイクロメートル)の表面にフォトクロミック色素を導入したDNAを修飾することで、光照射による結合解離機構を持たせました。こうすることで、可視光照射下では分子ロボットにマイクロビーズを捕捉させ、紫外光照射下では放出させることが可能になりました。(図2)
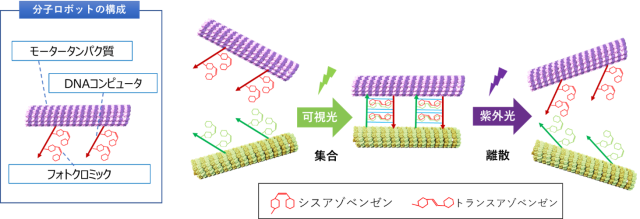
図2 分子ロボットの構成と集合・離散の仕組み
実験では分子ロボット単体と分子ロボットの群れ(今回は約100万体を使用)により、それぞれでマイクロビーズの輸送を行い比較検証しました。その結果、分子ロボット単体では可視光(波長480ナノメートル)、紫外光(波長365ナノメートル)照射下で直径3マイクロメートル程度までのビーズしか輸送することができませんでした。一方、分子ロボットの群れに同様の可視光と紫外光を照射し実験を行った結果、最大直径30マイクロメートルのビーズを輸送できることが分かりました。分子ロボット単体と比べると積荷サイズが10倍ほど拡大されたことになります。さらに3マイクロメートルのサイズのビーズを対象に分子ロボット単体と分子ロボットの群れを比較したところ群れによる輸送では5倍ほど効率(時間あたりの輸送距離と輸送量)が向上することも分かりました。また紫外光を局所的に照射することで、ビーズを任意の場所に集めることにも成功しました。輸送の空間精度も30マイクロメートル以下と誤差も極めて少ないことが分かりました。これらのように、群れの持つ利点を利用することで、分子ロボット単体ではなし得なかった大きなサイズの積荷を運搬できるようになっただけでなく、大幅な輸送効率の向上を可能にしました。
3.今後の予定
北海道大学、(株)分子ロボット総合研究所、関西大学はNEDO事業において引き続き、研究開発の現場にAIとVRの技術を組み込んだ共創環境を開発し、それを活用した分子ロボットの研究を進めます。今回の分子ロボットの群れの成果については将来的に、マイクロ・ナノマシンとしての薬剤の運搬や選択など医療分野、汚染物質の回収など環境保全分野への応用が期待されます。
NEDOは今後も、人とAIが相互に作用し共に進化するAIシステムの基盤技術の確立を通じて、少子高齢化に伴う生産年齢人口の減少など日本が直面する社会課題の解決に貢献することを目指します。
【注釈】
- ※1 群ロボット
- 多くの単純なロボットから構成されるロボットシステムです。ロボット間で相互作用しながら群れとして行動することで、単体のロボットにはできない複雑な仕事を効率よくこなすことができます。鳥や魚、昆虫などの群れが群ロボット開発のヒントになっています。
- ※2 モータータンパク質
- アデノシン三リン酸(ATP)の加水分解によって生じる化学エネルギーを運動に変換するタンパク質です。生物のほとんどすべての細胞に存在しており、物質の輸送や細胞分裂に関わっています。アクチン上を動くミオシン、微小管上を動くキネシンやダイニンが知られており、本研究では微小管とキネシンを使用しました。
- ※3 DNAコンピュータ
- 生体のDNA(デオキシリボ核酸)に含まれる塩基を演算素子として用いるコンピュータのことです。DNAを構成する4つの塩基「アデニン(A)」「チミン(T)」「グアニン(G)」「シトシン(C)」の分子配列および酵素の作用を演算処理の分野に応用しました。
- ※4 フォトクロミック色素
- 光をあてると色や構造が変わり、また別の波長の光をあてることで元の色・構造に戻すことができるような有機材料のことです。本研究では感光性分子として、可視光で平面形態(トランス体)、紫外光で屈曲形態(シス体)となるアゾベンゼンを使用しました。
4.問い合わせ先
(本ニュースリリースの内容についての問い合わせ先)
NEDO ロボット・AI部 担当:大塚、芝田、割田
(その他NEDO事業についての一般的な問い合わせ先)
NEDO 広報部 担当:鈴木、坂本、橋本、根本

