
2023-10-04 マサチューセッツ工科大学(MIT)
◆このセンサーを使用して、ロボットハンドは、指全体の感覚領域を使用して物体を把持でき、従来のロボットグリッパーによくあるピンチグラスプだけでなく、さまざまな把持タスクが可能となりました。
◆今後の研究では、センサーをより人間の指に似た形状に改良し、関節のように曲げられるようにする予定で、これにより、ロボットの触覚を向上させ、複雑な作業に対応できるロボットの開発が促進される可能性があります。
<関連情報>
- https://news.mit.edu/2023/finger-shaped-sensor-enables-more-dexterous-robots-1004
- https://arxiv.org/pdf/2309.10885.pdf
- https://arxiv.org/pdf/2309.10886.pdf
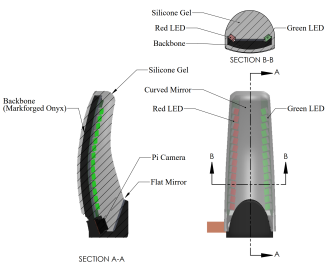
ゲルサイト・スヴェルト:人間の指の形をしたシングルカメラ触覚ロボット 広い感知範囲と固有感覚を持つ指 GelSight Svelte: A Human Finger-shaped Single-camera Tactile Robot Finger with Large Sensing Coverage and Proprioceptive Sensing
Jialiang Zhao and Edward H. Adelson
arxiv Published:19 Sep 2023
Abstract
Camera-based tactile sensing is a low-cost, popular approach to obtain highly detailed contact geometry information. However, most existing camera-based tactile sensors are fingertip sensors, and longer fingers often require extraneous elements to obtain an extended sensing area similar to the full length of a human finger. Moreover, existing methods to estimate proprioceptive information such as total forces and torques applied on the finger from camera-based tactile sensors are not effective when the contact geometry is complex. We introduce GelSight Svelte, a curved, human finger-sized, single-camera tactile sensor that is capable of both tactile and proprioceptive sensing over a large area. GelSight Svelte uses curved mirrors to achieve the desired shape and sensing coverage. Proprioceptive information, such as the total bending and twisting torques applied on the finger, is reflected as deformations on the flexible backbone of GelSight Svelte, which are also captured by the camera. We train a convolutional neural network to estimate the bending and twisting torques from the captured images. We conduct gel deformation experiments at various locations of the finger to evaluate the tactile sensing capability and proprioceptive sensing accuracy. To demonstrate the capability and potential uses of GelSight Svelte, we conduct an object holding task with three different grasping modes that utilize different areas of the finger. More information is available on our website: https:// gelsight-svelte.alanz.info.
ゲルサイト・スベルテ・ハンド:3本指、2自由度、触覚リッチ、低コスト 器用な操作のためのロボットハンド GelSight Svelte Hand: A Three-finger, Two-DoF, Tactile-rich, Low-cost Robot Hand for Dexterous Manipulation
Jialiang (Alan) Zhao and Edward H. Adelson
arxiv Published:19 Sep 2023

Abstract
This paper presents GelSight Svelte Hand, a novel 3-finger 2-DoF tactile robotic hand that is capable of performing precision grasps, power grasps, and intermediate grasps. Rich tactile signals are obtained from one camera on each finger, with an extended sensing area similar to the full length of a human finger. Each finger of GelSight Svelte Hand is supported by a semi-rigid endoskeleton and covered with soft silicone materials, which provide both rigidity and compliance. We describe the design, fabrication, functionalities, and tactile sensing capability of GelSight Svelte Hand in this paper. More information is available on our website: https://gelsight-svelte. alanz.info.

")
")