
身体装着型アシスト装具などへの応用を目指す
2020-01-09 新エネルギー・産業技術総合開発機構,中央大学
NEDOは、「次世代人工知能・ロボット中核技術開発」に取り組んでおり、今回、中央大学と共同で、人間のやわらかな動きを再現できる関節モジュールを開発しました。開発した関節モジュールは、空気圧人工筋肉と磁気粘性流体ブレーキで駆動され、人間の関節のように関節を曲げる力の大きさや角度だけでなく粘弾性を変化させることができるため、人との自然な接触や安全な協働作業などが可能となります。今後、本成果を身体装着型アシスト装具やリハビリ支援装置などへ応用することを目指します。
なお、今回開発した関節モジュールは、1月16日、17日に新宿ルミネゼロで開催される「NEDO AI&ROBOT NEXT シンポジウム」で展示されます。

図1 今回開発した関節モジュール
1.概要
少子高齢化や労働力不足といった社会課題への解決策として、街中や介護現場など人間に近いところで活躍するロボットが求められています。しかしながら、これまでのモーターと減速機によるロボット駆動は、大きな力で正確な動作が可能な反面、物体に衝突した際に停止できず、人間の近くで動作するには危険を伴いました。
一方で、人間の関節は、構造的に柔軟かつ軽量な筋肉の拮抗配置※により駆動されています。この構造によって、関節を曲げる力や角度だけでなく、関節の弾性(やわらかさ)や粘性(速度に対する反力、ダンパ要素)を変えられ、体が物体に当たった時でも関節が倣うように動き、衝撃を和らげることが可能です。
今般、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)と学校法人中央大学は、人間のやわらかな動きを再現できる関節モジュールを開発しました。開発したシステムは空気圧人工筋肉と磁気粘性流体ブレーキ(MR流体ブレーキ)で駆動され、人間の関節のように関節を曲げる力や角度だけでなく、粘弾性を変化させることができるため、人との自然な接触や、安全な協働作業などが可能となります。
今後、本成果を身体装着型アシスト装具やリハビリ支援装置などへ適用することを目指します。
なお、今回開発した関節モジュールは、1月16日から17日まで、新宿ルミネゼロで開催される「NEDO AI&ROBOT NEXT シンポジウム」で展示されます。
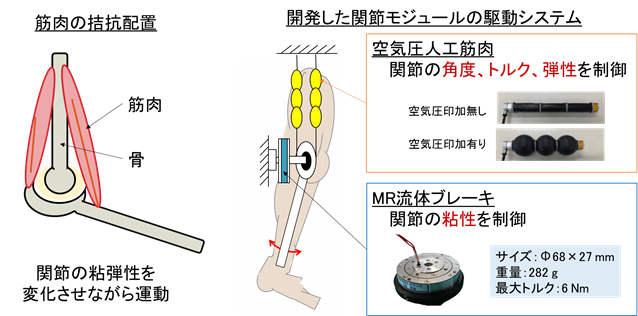
図2 筋肉の拮抗配置構造(左)と関節モジュールの構造(右)
2.今回の成果
今回開発した関節モジュールは、空気圧人工筋肉で関節の弾性(やわらかさ)を、MR流体ブレーキで粘性(速度に対する反力、ダンパ要素)を変化させることができます。これは、モーター駆動の装置が制御により弾性や粘性を変化させるのと異なり、ハードウェアそのものの特性を直接変化させるため、安全性や応答性に優れています。また、空気圧人工筋肉やMR流体ブレーキを駆動するために必要な空気圧源と電源も関節モジュール内に配置することで、オフラインでの駆動が可能です。さらに、空気圧人工筋肉が軽量であることや、空気圧源に従来のコンプレッサーではなく液化ガスを用いているため、4kgと軽量です。
空気圧人工筋肉、MR流体ブレーキ、およびアシスト装具の詳細については、別紙をご覧ください。
別紙:
【1】空気圧人工筋肉
空気圧人工筋肉とは、空気を注入しその圧力により動力を得るアクチュエーターです。軽量で、出力密度が高い、供給圧力に応じて弾性(やわらかさ)を変えられる、低コストなどの特徴があります。今回開発した関節モジュールでは,空気圧人工筋肉の弾性を変えられる性質を利用し,人間のような動きを再現しています。
なお、本プロジェクトでは、空気圧人工筋肉の長寿命化にも取り組んでおり、伸長結晶化特性を利用することで100倍の長寿命化を達成しています。詳細については以下をご覧ください。
人工筋肉の寿命を最大100倍にすることに成功(2019年12月11日 ニュースリリース) https://www.nedo.go.jp/news/press/AA5_101253.html
【2】多層薄型磁気粘性流体ブレーキデバイス
磁気粘性流体ブレーキデバイス(MR流体ブレーキ)について、提案する可変粘弾性システムのための専用デバイスを開発しました。磁気粘性流体(Magneto rheological fluid、以下MR流体)とは、油と粒径1~10μ m程度の強磁性体粒子の混合流体で、磁気の印加によりレオロジー特性※が変化する機能性流体です。磁場の印加によって鉄粒子の鎖(クラスタ構造)を形成することでレオロジー特性が変化します。このクラスタ構造生成は数ms程度の応答性を持ち可逆的かつ連続的にせん断応力を変化できるため、高機能ブレーキデバイスに適しています。このMR流体の発生するせん断力を大きくするには、応力発生面積を増やすのが有効ですが、内部構造が複雑になり流体充填が難しいなどの課題が存在しました。
このMR流体ブレーキデバイスについて、内部ディスクを多層化することで既存装置と比較しデバイスの薄型軽量化を実現しました。今回開発したブレーキは、外側ケース側に9枚、内側コア側に8枚の計17枚のディスクが隙間100μmで配置されています。この間隙にMR流体を充填することで、厚さ27mmの薄型化を実現し、重量に対する最大ブレーキ力は量産品の約4倍に向上しました。
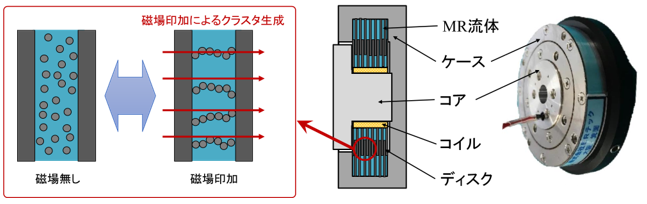
図1 MR流体ブレーキの動作原理と構造
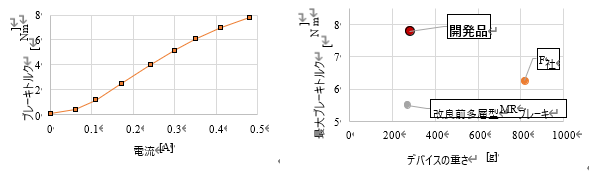
図 2 開発した MR 流体ブレーキの電流- 図 3 開発した MR 流体ブレーキと既存品の比較ブレーキ特性
【3】可変粘弾性下肢アシスト装具Airisist I
人間は運動中に関節の弾性や粘性を変化させながら運動しています。関節モジュールを応用して、角度とトルクに加えて粘弾性を逐次的・構造的に変化できるアシスト装置を人体と並列に配置しアシストを行えば、既存装置と比較して人体親和性の高いアシストが期待できます。
そこで、今回開発した関節モジュールを応用した下肢アシスト装具Airsist Iを開発しました。Airsist Iは、人間の粘弾性変化を参考に、対象となるアシスト動作の角度とトルクの情報から、アシストに適した粘弾性を算出し、アシストします。この制御手法により、例えば運動の開始時には粘弾性を下げ即応性を高め、運動の停止時には粘弾性を高めて安定性を高めるといったアシストが可能となります。Airsist Iは、筋電位測定実験などによってその人体親和性の高さが示されています。

図4 開発したAirsist Iの外観
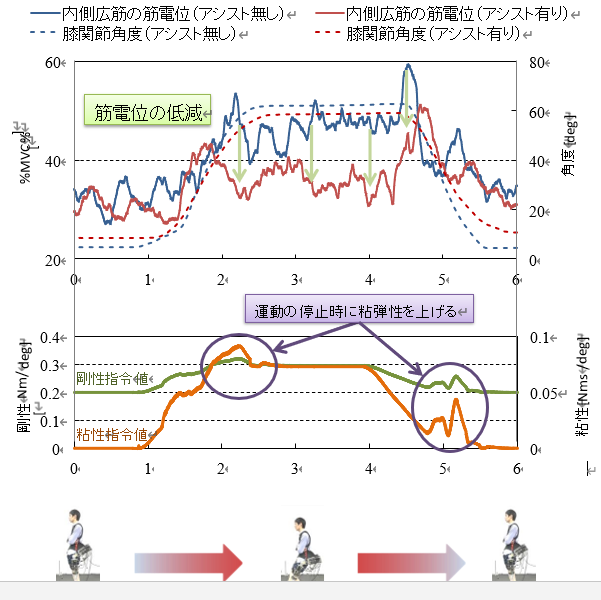
図5 スクワット動作時における指令粘弾性と計測した筋電位。青色がアシスト無しの状態、赤色がアシストありを示す。(筋電位が低いと筋活動度が低い、すなわちアシストされていることを示す。)
【注釈】
※ レオロジー特性
レオロジー特性とは、流動性を持つ物体に力が加わった際の特性のこと。MR 流体は磁場の印加により、流体中の鉄粒子が鎖(クラスタ構造)を形成することでレオロジー特性が変化する。
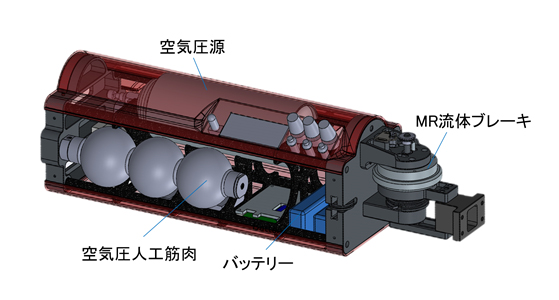
図3 設計した関節モジュール
3.今後の予定
NEDOと中央大学は、本成果を現在開発中の可変粘弾性下肢アシスト装具Airsistシリーズに適用するとともに、中央大学発のベンチャー企業である株式会社ソラリスを通じて事業化を行っていきます。
【注釈】
- ※ 拮抗配置
- 複数のアクチュエーターを互いに反対方向に動くように配置すること。例えば人間の筋肉の場合は、曲げる側の筋肉と伸ばす側の筋肉が拮抗配置されており、両方の筋肉の収縮度合を変えることで関節の固さを変えることができる。
4.問い合わせ先
(本ニュースリリースの内容についての問い合わせ先)
NEDO ロボット・AI部 担当:渡邊、木下
中央大学 理工学部中村研究室 担当:中村、奥井
研究支援室 担当:矢ケ崎
(その他NEDO事業についての一般的な問い合わせ先)
NEDO 広報部 担当:佐藤、坂本、中里


