2022-02-10 理化学研究所
理化学研究所(理研)情報統合本部ガーディアンロボットプロジェクト心理プロセス研究チームの佐藤弥チームリーダー、同インタラクティブロボット研究チームの港隆史チームリーダーらの共同研究チームは、ヒトのように表情をつくれるアンドロイド(ヒト型ロボット)を開発し、その妥当性を心理実験で実証しました。
本研究成果は、アンドロイドが表情を通してヒトと感情的なコミュニケーションをとることを可能にし、介護現場などにおけるアンドロイドの活用といった社会応用につながると期待できます。
これまで、ヒトのように表情をつくることを目指したアンドロイドの研究はいくつか報告されてきましたが、ヒトの表情筋[1]の動きを精緻に再現し、その妥当性を心理実験で厳密に検証した例はありませんでした。
今回、共同研究チームは、ヒトの解剖学・心理学の知見に基づいてアンドロイドの頭部を開発し、「Nikola」と名付けました。Nikolaの表情の妥当性を、三つの心理実験で検証した結果、まず、表情専門家によりNikolaが眉を寄せたり口角を上げたりする17個の「表情筋の動き」が全て適切であると評価されました。次に、一般参加者によりNikolaの怒り・幸福など六つの「基本感情の表情」が全て適切に認識されました。さらに、Nikolaがさまざまな速度で表情をつくると、一般参加者がヒトの表情と同様に速度の影響を受けること(例えば、驚きの表情は早いほど自然である)が示されました。これらの結果から、Nikolaの表情がヒトと同様であることが証明されました。
本研究は、オンライン科学雑誌『Frontiers in Psychology』(2月4日付)に掲載されました。

アンドロイドNikolaの基本6感情の表現
背景
表情は感情を伝える主要メディアです。アンドロイド(ヒト型ロボット)がヒトと共生していくためには、表情を通して感情的なコミュニケーションをとることが望まれます。
ヒトのように表情をつくることを目指したアンドロイドの開発は、これまでいくつかの研究で報告されていました。しかし、ヒトのデータに基づいて表情筋の動きを精緻に再現し、その妥当性を心理実験で厳密に検証した例はありませんでした。
研究手法と成果
共同研究チームは、ヒトの解剖学と心理学の知見に基づいたアンドロイドの頭部を開発し、Nikolaと名付けました。そして、Nikolaの表情の妥当性を三つの心理学実験で検証しました。
一つ目の研究では、アンドロイドNikolaは17個の「表情筋の動き(例えば、眉を寄せたり口角を上げたりなど)」をつくり出し、それらを表情の専門家が心理学研究で用いる顔面動作符号化法[2]と呼ばれるヒトの表情筋活動を評価する方法で確認しました(図1)。その結果、全ての表情筋がヒトと同様の動きのパターンであることが証明されました。
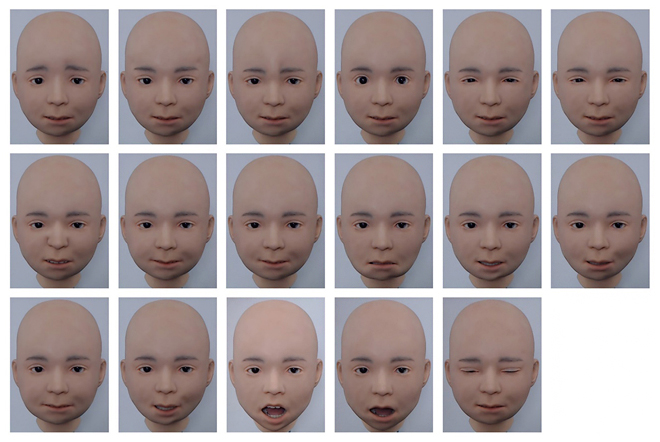
図1 アンドロイドNikolaの17個の個別表情筋の動き
心理学研究で用いられる顔面動作符号化法により専門家が評価し、ヒトと同様の動きのパターンであることが証明された。
二つ目に、六つの基本感情(怒り・嫌悪・恐怖・幸福・悲しみ・驚き)の表情をしたNikolaの各写真を用いて、一般参加者30人が感情を認識できるか実験しました。その結果、統計的に有意なレベル[3]で、全ての感情が適切に認識されることが示されました(図2)。
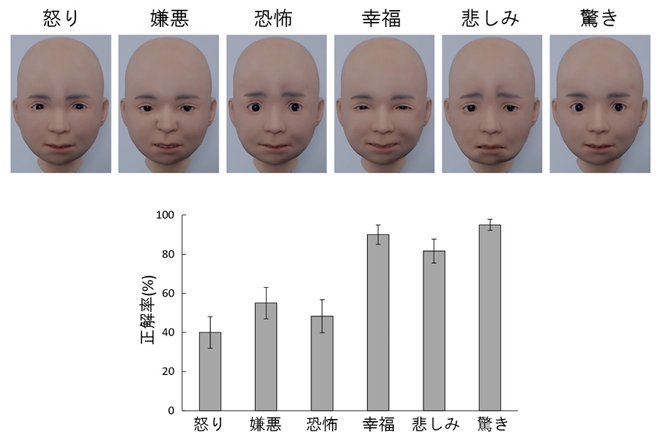
図2 Nikolaの基本6感情の写真(上)に対する一般参加者による認識結果
統計的に有為なレベル(つまり偶然に得られる確率が十分低い)で感情が認識されることが示された。
三つ目に、Nikolaが基本6感情の表情を四つの速度(0.3秒、0.5秒、1.0秒、2.0秒)で表出する動画を作製し、一般参加者30人が各「表情の自然さ」を評価しました。実験結果から、例えば驚きの表情は早い方が自然である、悲しみの表情は遅いほうが自然であるなど、ヒトの表情の場合と同様に、Nikolaにおいても感情によって速度の影響が異なることが示されました(図3)。
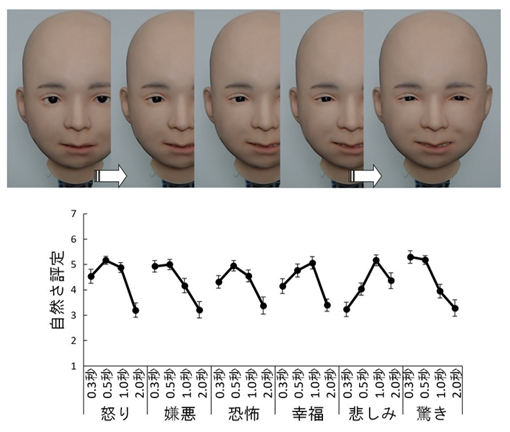
図3 Nikolaの動的表情の例(上)と一般参加者による自然さの評定結果(下)
上:無表情から幸福な表情への変化。
下:ヒトの表情の場合と同様に、スピードを変化させることで表情ごとに評定が変わることが示された。例えば驚きや嫌悪、怒りの表情は早い方が自然で、悲しみの表情は遅い方が自然。
今後の期待
今回の知見は、アンドロイドがヒトと同様の空間的・時間的パターンで感情を表現できると実証した世界初の例です。
今後、アンドロイドNikolaは感情コミュニケーションを調べる社会心理学実験で役立つことが期待されます。これまでこうした実験では、サクラ役のヒトが表情をつくるため実験が統制できず、また、表情の写真を呈示する方法では現実感が弱いという問題がありました。Nikolaを用いることで、統制された現実において感情コミュニケーションを調べることが可能になると期待できます。
また、将来、Nikolaのように感情コミュニケーションをとれるアンドロイドが社会で役立つことが考えられます。例えば、介護の現場では、温かいコミュニケーションによりストレスや問題行動が減る可能性が示されていますが、高齢者の増加とともに、介護現場での人手不足が心配されています。こうした状況において、アンドロイドが介護現場で喜びや悲しみの感情を伝えられれば、人々の幸福な老後に貢献すると期待できます。
補足説明
1.表情筋
顔の表情をつくる筋肉の総称で、顔面筋とも呼ばれる。ヒトの顔には、眼輪筋、前頭筋、鼻筋、口輪筋など、数十以上の表情筋があるとされる。
2.顔面動作符号化法
ヒトの顔の動きの有無や強度を、視覚情報に基づいて評価するシステム。ポール・エクマン博士らが解剖学に基づいて体系立てた。
3.統計的に有意なレベル
ある現象が偶然に得られる確率が十分に低い(よって意味があると考えられる)ことを指す。
共同研究チーム
理化学研究所 情報統合本部 ガーディアンロボットプロジェクト
心理プロセス研究チーム
チームリーダー 佐藤 弥(さとう わたる)
研究員 難波 修史(なんば しゅうし)
インタラクティブロボット研究チーム
チームリーダー 港 隆史(みなと たかし)
上級研究員 イシイ・カルロス・トシノリ(Ishi Carlos Toshinori)
京都大学情報学研究科
大学院生 ヤン・トウショウ (Dongsheng Yang)
教授 西田 眞也(にしだ しんや)
原論文情報
Sato, W., Namba, S., Yang, D., Nishida, S., Ishi, C., & Minato, T., “An android for emotional interaction: Spatiotemporal validation of its facial expressions”, Frontiers in Psychology, 10.3389/fpsyg.2021.800657
発表者
理化学研究所
情報統合本部 ガーディアンロボットプロジェクト 心理プロセス研究チーム
チームリーダー 佐藤 弥(さとうわたる)
インタラクティブロボット研究チーム
チームリーダー 港 隆史(みなと たかし)
報道担当
理化学研究所 広報室 報道担当

