仮想空間でヘリカル型原型炉を組み立てる
2018-05-17 大学共同利用機関法人 自然科学研究機構 核融合科学研究所
バーチャルリアリティ(仮想現実)という言葉を、皆さんも、よく耳にされることと思いますが、核融合科学研究所には、没入型バーチャルリアリティ装置(CompleXcope:コンプレックスコープ)があります。この装置では、縦3メートル×横3メートルのスクリーンで4方向(前左右下)から囲まれた空間にデータを投影し、この空間に自分自身が入ることで、仮想現実の世界に入り込んで、実際には存在しないモノが、あたかもそこに存在しているように見えたり感じたりすることができます。研究所では、この装置を用いて、プラズマや核融合に関するシミュレーションデータや大型ヘリカル装置(LHD)の実験データを可視化し、複雑なプラズマ現象の解析・研究等を行っています。今回は、このCompleXcopeを用いた最新の研究を紹介します。
研究所では、将来の核融合発電炉を実現するために、その原型となる「ヘリカル型原型炉」の設計研究も進めています。原型炉は、核融合エネルギーによる発電を実証するためのもので、多くの機器が取り付けられ、とても複雑な構造になる見込みです。
ヘリカル型原型炉の設計では、様々な課題を解決しなければなりませんが(詳細は、バックナンバー225をご参照ください)、建設時の組み立て工程と稼働開始後のメンテナンス手順も重要なポイントです。例えば、炉内部品を取り出す時に他の部品と干渉する(ぶつかる)かどうかを予め考慮しながら、部品の位置や、組み立て工程、メンテナンス手順等を決めなければなりません。また、部品の取り付け・取り外しや、移動に利用するロボットアームの設計と、それを動かす手順の検討も必要です。これまで、このような検討は、設計用のソフトウェアを使って、通常のパソコンのディスプレイのような2次元ディスプレイに表示された情報を基に行ってきました。しかし、この方法では、本来3次元の情報を2次元に投影するために奥行き情報が失われてしまいます。そのため、部品やロボットアームの動きを検討し、検討結果を設計に反映することが大変難しく、この問題を解決できる新たなシステムの開発が求められていました。
そこで、研究所では、CompleXcopeを使って、ヘリカル型原型炉の炉内部品の位置関係やロボットアームの動きを、3次元で確認できるシステムを新たに構築しました。このシステムでは、まず、原型炉の設計データを仮想空間に投影し、自分自身が原型炉の中に入って歩いたり視点を変えたりするなどして、部品の位置関係をあらゆる方向から確認できるようにしました。次に、ロボットアームを含めたデータを投影し、ロボットアームによる部品の取り付け・取り外しや移動を確認できるようにし、さらに、自分自身の「手」を仮想空間の中に投影することで、部品をつかんで動かしたりすることもできるようにしました。これらにより、ロボットアームや部品の動きを、自分自身が原型炉の中や傍らに立って、確認することが可能になりました。その結果、部品同士が干渉しないか、ロボットアームの動きやメンテナンス手順が適切か等、3次元の仮想空間の中で、効率よく検討できるようになりました。
このように、研究所でも活用されているバーチャルリアリティ装置ですが、その対話性(自分自身の動きに合わせて仮想空間に投影されるデータが変わったり、コントローラーでデータの表示方法を変更したりすること)や没入感(仮想空間に入り込むような感覚のこと)等の特徴を生かして、他分野でも活用が期待されています。例えば、医療教育としてMRIの画像を可視化して手術の手順等の決定を支援するシステムや、仮想空間の中で歩行訓練をするなどのリハビリテーションへの応用、スポーツの動作を可視化して動作分析を支援することで技術向上を図るシステムなど、様々な分野で研究が進められています。今後は、このような様々な分野の研究者とも協力して、バーチャルリアリティ装置を用いた可視化研究を更に推進し、それを通して、核融合発電の実現に貢献していきます。
以上

図1 原型炉の設計データを、CompleXcopeを用いて、仮想空間に投影している様子。 自分自身が原型炉の中に入って歩いたり、視点をいろいろと変えたりすることができます。また、仮想空間の中に投影された自分自身の「手」で部品をつかんで動かしています。
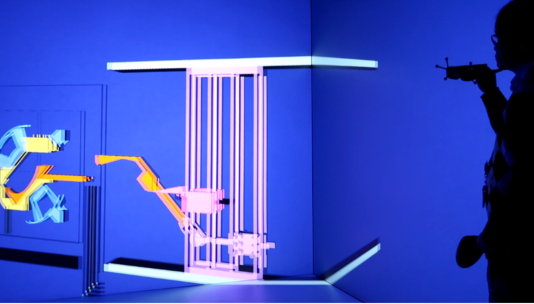
図2 原型炉の設計データの一部とロボットアームを仮想空間に投影している様子。部品(オレンジ色)をロボットアーム(ピンク色)で運び、動きを確認しています。
