
2020-02-05
SELENEの時とかなり様子が違うなぁ・・・」と、思わずつぶやいたのは2017年6月のことでした。
科学観測をする際、月探査機のSELENEは月を周回しながら月面を真下に見るのに対し、「はやぶさ2」は太陽を周回しながら小惑星リュウグウを見ます。科学観測では、対象天体のどこを見た(観測した)のかを知ることが重要で、そのためには探査機の姿勢と位置(軌道)の情報が必要です。姿勢は、スタートラッカーというカメラで背景の星を観測することで分かります。一方、探査機の軌道は電波を使った地上局からの観測で決めることが多いです。一般に、その位置の誤差は数百mですが、直径約3500 kmの月と直径約1 kmのリュウグウでは、仮に位置の誤差が同程度であってもそれが持つ意味は違ってきます。小さなリュウグウの観測にとって、数百mのずれは大きすぎるのです。冒頭のつぶやきの背景にはこのような事情がありました。
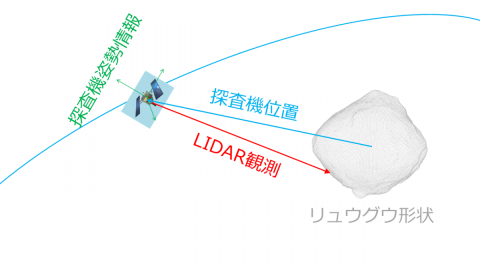
図1:LIDAR観測の概要。正しい軌道の場合。
そこで、レーザ高度計(LIDAR)のデータを利用して探査機位置のずれを小さく(軌道改良)できないかと考えました。「はやぶさ2」レーザ高度計は、自身が出すレーザ光がリュウグウ表面で反射して戻るまでの時間から、両者の間の距離を測る観測機器です。図1はこの観測の概念図で、私たちはこの様子を計算機の中で再現しています。もし私たちが持っている全ての情報が正しければ、赤矢印の先端で示されるレーザの反射点(フットプリントと呼びます)はリュウグウの表面にピタリとくるように計算されるはずです。しかし、もし「はやぶさ2」の軌道情報が間違っていたら、フットプリントはリュウグウ表面からずれて計算されてしまいます(図2)。逆に、このずれ(残差)ができるだけ小さくなるような「はやぶさ2」の位置を推定しようというわけです。私たちは、このような手法を開発し「はやぶさ2」の軌道を改良しました(*)。
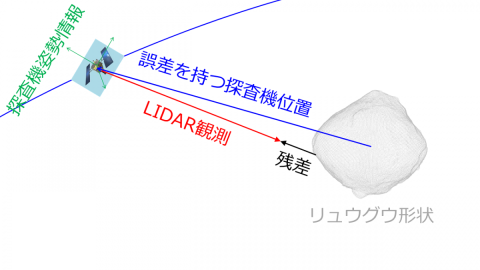
図2:LIDAR観測の概要。誤差を持つ軌道の場合。
「はやぶさ2」は南北に首を振ってリュウグウ全体を観測することがあります。図3はこのような「スキャン観測」時のLIDARフットプリントの分布を示したものです。この時の初期軌道は、実際よりもリュウグウに近い探査機位置を予測しており、この情報に基づくとリュウグウの形を正しく表現することができません(図3a)。一方、改良後の軌道を使うとリュウグウの凸凹をより正しく把握することができます(図3b)。この地形データを利用して、クレータ形状や表面粗さの研究が進みつつあります。
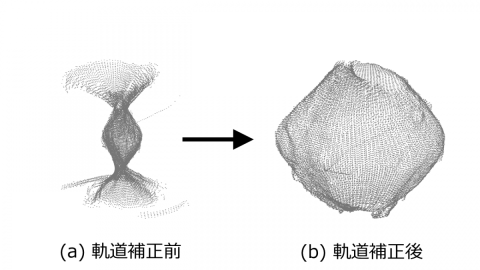
図3:LIDARデータが描き出すリュウグウの形。
さて、2018年6月に「はやぶさ2」が到着する前に得られていたリュウグウの情報は限られていたので、着陸する場所は現地到着後に収集する観測データに基づいて決めることになっていました。この手続きを着陸地点選定(Landing Site Selection, LSS)と呼んでいました。私たちが改良した探査機軌道はこのLSSにも活用されました。リュウグウに滞在する1年半の間に「はやぶさ2」がこなすべき仕事はとても多いので、LSSに割ける時間は約50日しかありませんでした。このため、データが地上にダウンリンクされてから1~2日で軌道を改良する必要があり、私たちが開発した手法が役に立ちました。
ここで、「あれ?」と思った記憶力の良い人がいるかもしれません。「はやぶさ2」がリュウグウに着いたのは2018年6月なのに対し、冒頭のつぶやきは2017年6月でした。実は、リュウグウ到着の1年以上前に、データ解析のプロセスを確認するためにLSS訓練(**)が行われました。あのつぶやきは訓練データの解析中にでたもので、これをきっかけに事前にツールを整備して本番に臨むことができました。訓練が無ければ、タイムリーな軌道改良も実現しなかったでしょう。事前準備の重要性を身に染みて感じたできごとでした。この経験は今後の探査にも活かしたいと思います。
(*)研究成果はMatsumoto, K., et al., “Improving Hayabusa2 trajectory by combining LIDAR data and a shape model” として、2019年12月に米国の国際学術雑誌 Icarusにオンライン掲載されました。
(**)LSS訓練の概要は日本惑星科学会誌「遊・星・人」に掲載されています( リンクはこちら )。

