2026-04-17 ハーバード大学
")
<関連情報>
- https://seas.harvard.edu/news/simple-robots-collectively-build-and-excavate-are-inspired-ants
- https://journals.aps.org/prxlife/abstract/10.1103/cx3h-bwhc
- https://tiisys.com/blog/2022/12/20/post-114793/
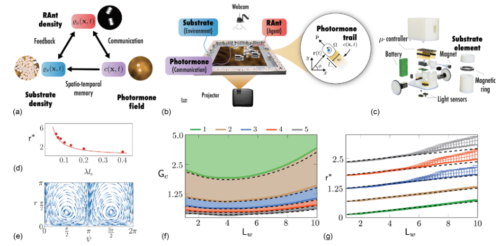
ロボテクトニクス:群れにおける光走性に基づく集合・解散現象の出現 Robotectonics: Emergent Phototactic Aggregation-Disaggregation in Swarms
Fabio Giardina, S. Ganga Prasath, and L. Mahadevan
PRX Life Published: 10 April, 2026
DOI: https://doi.org/10.1103/cx3h-bwhc
Abstract
The collective construction of complex architectures by social insects involves the use of decentralized spatiotemporal signals in a dynamical environment that changes the behavior of the insects and is changed by them. Inspired by this original example of “stigmergy,” we show that a robot collective can nucleate, construct, and deconstruct aggregates via a trapping instability by simply altering their local transport behavior. We quantify these observations in terms of a two-dimensional phase space that encompasses agent-agent interaction and the agent-environment interaction (collection and deposition). Our results show how coordinated function can emerge spontaneously through simple local rules for sensing and action without the need for global representation, planning, or optimization/control algorithms, in sharp contrast with the traditional views of complex task execution. More broadly, our study shows that embodied collectives can leverage the environment as both a communication channel and a spatiotemporal memory, coupling organismal behavior to environmental remodeling leading to “exbodied intelligence.”
")
")