2024-03-26 富士通株式会社
当社は、海洋の状態をデジタル空間に高精度に再現し、海洋を構成する環境の変化や海洋を活用した施策の効果などのシミュレーションによる予測を可能にする海洋デジタルツインの研究開発の一環で、AIを活用し、自律型無人潜水機(AUV: Autonomous Underwater Vehicle)を用いて、海中の生物や構造物の解像度が高い3次元形状データを取得する技術を開発しました。
本技術は、AIを活用して画像を鮮明化することで、濁った海中でも対象物を識別し形状を計測できる画像鮮明化AI技術と、波や潮流の中でも自律型無人潜水機からの安定計測を可能にするリアルタイム計測技術から成ります。本技術により、カーボンニュートラルや生物多様性の保全に向けた海洋調査に際して、対象となる生物や構造物の状況を可視化し、体積などを推定することが可能になりました。これらの技術に関して、国立研究開発法人海上・港湾・航空技術研究所 海上技術安全研究所(注1)(以下、海上技術安全研究所)とともに、沖縄県石垣島近海において実証実験を行い、サンゴ礁の精密な3次元形状データを取得することに成功し、技術の有効性を確認しました。
当社は今後、今回確立した技術の測定対象を、ブルーカーボン(注2)の吸収量が多い海藻などに拡大することを目指し、2026年度中に藻場に関する海洋デジタルツインの確立を目指します。これにより、企業・自治体などによる、藻場が吸蔵する炭素の見積りや藻場の保全・造成をする施策、サンゴ礁における生物多様性を保全する施策などの立案を支援し、サステナビリティ・トランスフォーメーション(SX)を推進します。
当社は実証実験の詳細な結果について、2024年3月27日(水曜日)から3月30日(土曜日)まで開催される令和6年度公益社団法人日本水産学会春季大会で発表する予定です。
 図1 SXを実現する海洋デジタルツインの構想
図1 SXを実現する海洋デジタルツインの構想
背景
当社は持続可能な成長に向けたマテリアリティの1つとして地球環境問題の解決を掲げ、気候変動(カーボンニュートラル)や自然共生(生物多様性の保全)に取り組んでいます。海洋は、その面積が地球の表面積の約7割に相当し、気候変動に大きな影響を及ぼすことから、当社ではこの海洋におけるカーボンニュートラルや生物多様性の保全などの施策立案を支援するために、海洋に関する施策の事前検証を可能にする海洋デジタルツインの開発に取り組んでいます。海洋デジタルツインの構想では、海藻、サンゴ礁などの海中の生物や、水産資源や海洋環境に影響を及ぼす構造物などの、植生分布や3次元形状といったデータを、自律型無人潜水機や衛星などを活用してデジタルデータとして収集し、海洋を構成する環境や生物の成長などの変化を数値シミュレーションするモデルを構築し、海洋に関する施策の事前検証に活用します。例えばブルーカーボンに関わる施策の事前検証のためには、海中生物の3次元形状データから体積と植物種を推定し二酸化炭素吸収量を算出するほか、生物学の知見を取り入れて、海中生物の生育の時系列シミュレーションを行います。これにより、ある海洋生態系の保全施策を取った場合の二酸化炭素吸収量の推移を、海中生物の生育状況まで含めてデジタル空間上でシミュレーションし、地球温暖化対策の効果を事前に検証できるようにすることを目指しています。
海洋生態系の保全や二酸化炭素吸収量の把握を行うには、分解能(注3)が数cm程度の高分解能3次元形状データを取得し、海中の生物の識別と体積推定を行う必要がありますが、音響ソナーのようなこれまでの技術では、ビーム幅の限界といった問題のために、分解能が10cm程度の粗いデータになっているのが課題でした。
開発技術について
当社は上記の課題を解決するため、濁りや波、海流などの影響がある海洋特有の困難な環境でも、海中の生物や構造物の高解像度3次元形状データを取得可能にする2つの技術を開発しました。
1. 海中の被写体の色や輪郭を復元する画像鮮明化AI技術
濁った海中での撮影により色が劣化して輪郭のぼけた画像でも、生物や構造物を高分解能で3次元化するために、海中の被写体に最適化した深層学習を行った画像鮮明化AI技術を開発しました。この技術は濁り除去と輪郭の復元を実現する2つのAIからなり、被写体本来の色を復元し、ぼけた輪郭を改善した画像を生成した上で3次元化します。これにより、3次元化処理・被写体認識の際のエラーを防止し、物体ごとに形状計測することが可能になりました。
 図2 画像鮮明化AI技術によるサンゴ礁の精密な3次元形状データ化
図2 画像鮮明化AI技術によるサンゴ礁の精密な3次元形状データ化
2. 移動中の自律型無人潜水機からリアルタイムに3次元計測ができる海中3次元計測技術
海中でリアルタイムに3次元計測するため、当社が国際体操連盟(注4)と共同開発した体操の判定を支援する「Judging Support System」で培った、短周期のレーザー発光と高速走査による高速サンプリング技術を採用しました。さらに、3つのレーザー波長の中から、海況によって計測に適した波長を選択できる水中LiDAR(Light Detection And Ranging、注5)を導入しました。これにより移動している自律型無人潜水機から3次元計測ができるだけでなく、物体の動きを追従する技術を開発することにより、動いている物体の計測も可能になることが期待されます。
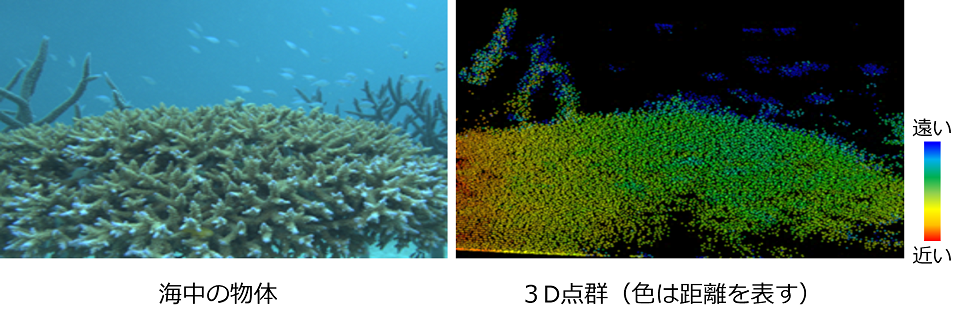 図3 水中LiDARによる3次元計測結果
図3 水中LiDARによる3次元計測結果
本技術の効果を確認するため、当社は海上技術安全研究所と共に、同研究所が開発しているAUV-ASV連結システム(注6)に、カメラやリアルタイムに3次元計測を行うLiDARなどを一体化した水中フュージョンセンサーを搭載し、海中データをリアルタイムに自動で取得する実証実験(注7)を行いました。この実験から海中に設置された配管などやサンゴ礁のセンチメートルオーダーの高解像度3次元形状データを、リアルタイムに取得することに成功しました。
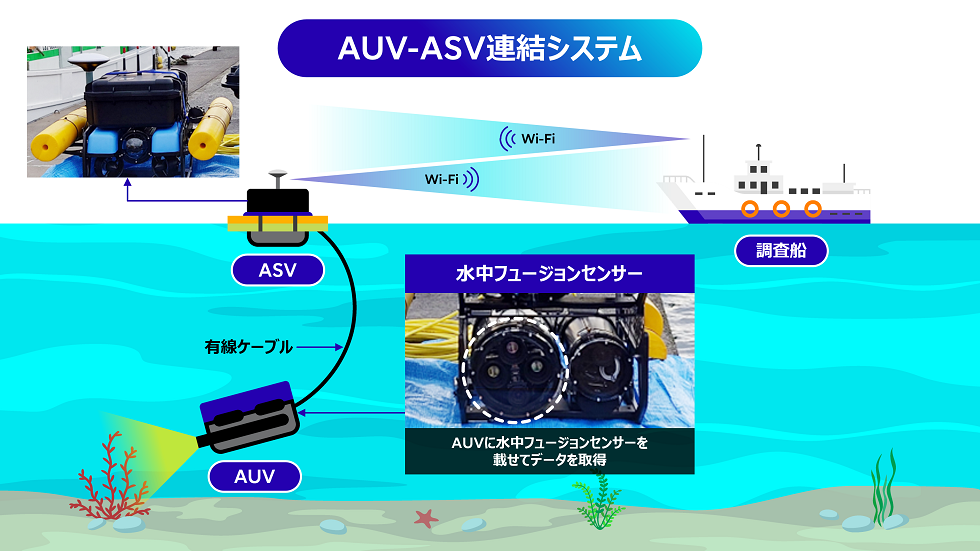 図4 AUV-ASV連結システムとデータ取得風景
図4 AUV-ASV連結システムとデータ取得風景
今後の展望
今後、強い潮流や起伏に富んだ海底地形など様々な環境においても、安定的にデータ取得が可能な技術開発を進めるとともに、ブルーカーボンの吸収量の多い海藻から脱炭素への貢献が期待できる洋上風力発電設備の点検に至るまで測定対象を拡大し、ユースケースを蓄積します。また計測した3次元形状データを基に、生物学や環境学などの知見を取り入れたシミュレーションを行う、海洋デジタルツインの開発を進めます。そしてカーボンニュートラルに向けた施策に取り組む企業や自治体・団体とのパートナーシップを構築し、海洋デジタルツインを用いたお客様の施策立案支援を目指します。
商標について
記載されている製品名などの固有名詞は、各社の商標または登録商標です。
注釈
注1 国立研究開発法人海上・港湾・航空技術研究所 海上技術安全研究所:
所在地 東京都三鷹市、所長 峰本 健正
注2 ブルーカーボン:
沿岸・海洋の生態系に取り込まれ、貯留される炭素のこと。
注3 分解能:
計測器などが有する、物理量を識別できる能力。計測対象のうち、見分けられる2点間の最小距離で表す。
注4 国際体操連盟:
本部 スイス ローザンヌ、会長 渡辺 守成
注5 LiDAR:
対象物にレーザーを照射し、反射光を光センサでとらえて、対象物までの距離や対象物の形などを測定する技術。
注6 AUV-ASV連結システム:
海中で自律型無人潜水機(AUV: Autonomous Underwater Vehicle)が撮影した画像を有線ケーブルで海上の自律型無人水上機(ASV: Autonomous Surface Vehicle)に送り、自律型無人水上機からWi-Fiで船舶へ送信する、海上技術安全研究所が開発した海中調査システム。
注7 実証実験:
2024年1月22日(月曜日)から1月25日(木曜日)の間に沖縄県石垣島近海において実施。
本件に関するお問い合わせ
富士通コンタクトライン(総合窓口)

")