")
2023-07-31 アメリカ合衆国・コロラド大学ボールダー校(CUBoulder)
・ CU Boulder とドイツ・マックスプランク・インテリジェントシステム研究所(MPI-IS)が、多機能のシェイプシフティングディスプレイを開発。
・ トランプゲーム用のテーブルほどのサイズで、外部からの圧力を感知して様々なパターンを立体的にポップアップ表示する、ソフトロボットの「筋肉(アクチュエーター)」の 10×10 個のグリッドで構成される。
・ ポップアップ表示によるテキストを流したり、液体の入ったビーカー乗せて振動させたりすることもできる。テキスト、オーディオやビデオの長距離送信が可能となっている現在のデジタル時代に触感をもたらすもの。
・ 2018 年に開発した Hyraulically Amplified Self-Healing Electrostatic (HASEL)(油圧増幅自己治癒型静電)アクチュエーターを活用したディスプレイで、商業化はまだ先となるが、バーチャルゲーミング用のセンサーグローブや、リンゴとバナナを自動分別できるスマートなベルトコンベア等も構想する。
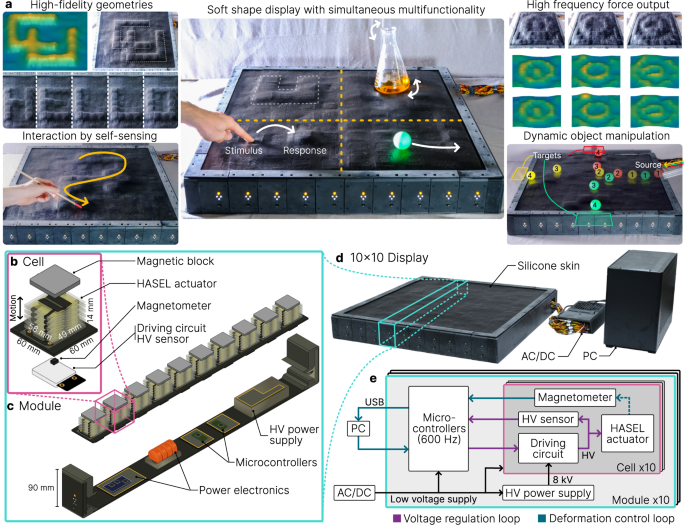
・ テーブルサイズのグリッド状に並ぶ 100 個の正方形のセルそれぞれが HASEL アクチュエーターで、それらのは小さなアコーディオンのような形状のプラスチックの小袋で作られている。電流を通すことで小袋中の液体の位置が変わり、アコーディオンが拡張して隆起する。
・ アクチュエーターには柔軟な磁気センサーも含まれており、指で押した圧力を感知する。磁気ワンドを使ったディスプレイの操作を楽しむこともできる。同様なスマートタブレットが他で開発されているが、今回開発のディスプレイは柔軟、小型で、操作が迅速(1 秒あたり最高 50 回のアクチュエーション)。
・ 現在、HASEL アクチュエーターの縮小によるディスプレイの精密化に取り組む。スマートフォンにニュース記事を表示して点字としてスクリーンをポップアップさせるようなことも可能になる。
・ また、ディスプレイを裏返すことで、VR でのオブジェクトへの触感を再現する、触れた指を押し返すようなグローブの設計も可能に。HASEL アクチュエーターは、ほぼ無音で作動する。
・ 2017 年、動物細胞使用を代替する医療デバイスやロボット手術ツールの開発を目的とした、「sTISSUE」と呼ばれるシリコーンベース材料製の柔軟な人工臓器の開発時にテーブルトップのディスプレイを考案した。
URL: https://www.colorado.edu/today/2023/07/31/3d-display-could-soon-bring-touch-digital-world
<NEDO海外技術情報より>
関連情報
Nature Communications 掲載論文(フルテキスト)
A multifunctional soft robotic shape display with high-speed actuation, sensing, and control
URL: https://www.nature.com/articles/s41467-023-39842-2
Abstract
Shape displays which actively manipulate surface geometry are an expanding robotics domain with applications to haptics, manufacturing, aerodynamics, and more. However, existing displays often lack high-fidelity shape morphing, high-speed deformation, and embedded state sensing, limiting their potential uses. Here, we demonstrate a multifunctional soft shape display driven by a 10 × 10 array of scalable cellular units which combine high-speed electrohydraulic soft actuation, magnetic-based sensing, and control circuitry. We report high-performance reversible shape morphing up to 50 Hz, sensing of surface deformations with 0.1 mm sensitivity and external forces with 50 mN sensitivity in each cell, which we demonstrate across a multitude of applications including user interaction, image display, sensing of object mass, and dynamic manipulation of solids and liquids. This work showcases the rich multifunctionality and high-performance capabilities that arise from tightly-integrating large numbers of electrohydraulic actuators, soft sensors, and controllers at a previously undemonstrated scale in soft robotics.
")
")