
2022-03-01 農研機構
ポイント
農研機構は、トマトやパプリカ等の施設栽培において、AIによる着果情報のモニタリング技術を開発してきました。検出された果実画像を基に、果実の位置と熟度を特定し、収穫可能果実数から日ごとの収穫データを予測します。3月9日~12日に東京ビッグサイト東ホールで開催される「国際ロボット展2022」に出展します。
概要
農研機構は、大規模施設園芸1)において、移動しながら植物体を連続撮影して展開画像2)を生成し、AIを活用して画像を分析することで、収穫可能な果実数を正確に把握できる、「着果モニタリングシステム」を開発してきました。これにより、収穫時に予想される作業量に基づく適切な作業計画、効率的な労務管理への寄与が期待されます。
この度、従来から対象としてきたトマトに加え、パプリカでの実用化に目途が立ったため、農業生産法人等での実証試験等を通じて、2022年度以降の実用化を目指します。本成果について、3月9日(水)から12日(土)に東京ビッグサイト東ホールで開催される「国際ロボット展2022」3)に出展します。

着果モニタリングシステム(トマトを対象とした場合)
関連情報
予算:農林水産省委託プロジェクト研究「AIを活用した栽培・労務管理の最適化技術の開発」(JPJ006237)、農研機構運営費交付金
特許:特開2020-078978、特開2021-095027
問い合わせ先
研究推進責任者 :農研機構 農業機械研究部門 所長 大谷 隆二
研究担当者 :同 知能化農機研究領域
研究員 下元 耕太、グループ長 深津 時広
農研機構 基盤技術研究本部 農業ロボティクス研究センター
研究員 内藤 裕貴
広報担当者 :農研機構 農業機械研究部門 研究推進部 研究推進室 広報チーム
チーム長 藤井 桃子
詳細情報
社会的背景
近年、施設園芸において大規模化の動きが広がっています。施設面積がおおむね1ha 以上の経営体では、数十名から百名規模での雇用による組織的な運営がなされています。大規模生産法人では、生産コストの約3割を人件費が占めており、その中でも収穫作業時間が長く、作業の効率化を図ることで経営の改善につながります。そのためには、予測される収穫果実数から必要な人員数や作業時間を算出し、それに基づいた人員配置の計画を立てる必要がありますが、日々の収穫果実数を正確に予測する手法は確立されていませんでした。
研究の経緯
農研機構では、収穫量や収穫作業時間を予測するために、無人で施設内を自動走行し、収穫可能なトマトの果実数を推定する着果モニタリングシステムを開発し、公表してきました(図1)(農研機構 成果情報 トマトの収穫作業管理を支援する自動走行型着果モニタリング https://www.naro.go.jp/project/results/4th_laboratory/iam/2019/iam19_s01.html)が、この技術を応用し、パプリカにおいても実用化に目途をつけることができました。
研究の内容・意義
着果モニタリング装置は、高所作業台車4)(図2)を一定速度で移動させながら植物体を連続撮影して展開画像を生成します。AIを利用して展開画像を分析することにより、画像内に含まれる収穫可能な果実を自動で検出します。
深層学習により構築した果実検出モデルは、画像から果実を検出します。次に、果実領域に含まれる画素の色情報から果実の成熟度を評価し、成熟順に分類します。これにより、展開画像内の果実の熟度が特定され、収穫可能とされる果実数を算出します。この果実数を取得することで、管理や収穫に必要とされる人員配置の策定に寄与できます。当該装置を用いた大規模パプリカ生産法人における運用試験を通じて、着果モニタリング装置で収穫可能と判断された果実数と翌週の同撮影列における収穫量との間に高い相関が認められています(図2右)。
今後の予定・期待
開発機は2022年度以降の実用化を目指します。今後は、引き続き生産法人等での試験を通じて、作業者の違いによって生じる収穫作業時間の予測誤差の低減や予測適応期間の拡大を図る予定です。さらに、トマトやパプリカ以外の作物への適用可能性、着花計測、病虫害・生理障害株検出及び葉面積計測など、他の植物体画像分析のための汎用的な画像収集装置としての利用も検討する予定です。
用語の解説
1)大規模施設園芸:施設面積がおおむね1ha以上で養液栽培装置を有する施設を想定。
(出典:大規模施設園芸・植物工場 実態調査・事例調査、日本施設園芸協会)
2)展開画像:連続して撮影した写真をつなぎ合わせたパノラマ画像
3)国際ロボット展2022:国際ロボット展は、1974年の初開催以降、2年に一度の開催で、今回で24回目を迎え、”世界最大規模のロボット専門展” として国内外から高く評価されています。会期中は、国内外から最先端のロボットが展示されるほか、AI、ICT、要素技術などロボットに関わる高度な技術が一堂に展示されます。
(出典:https://biz.nikkan.co.jp/eve/irex/overview.html#preface)
4)高所作業台車:高所で作業を行うための機構(昇降装置等)を持つ特殊な車輌。大規模施設園芸では一般的に使用されている。 本研究において使用するものは、作業時に人が乗車して操作する必要がある。
参考図

図1 施設園芸におけるスマート化の現状と構想

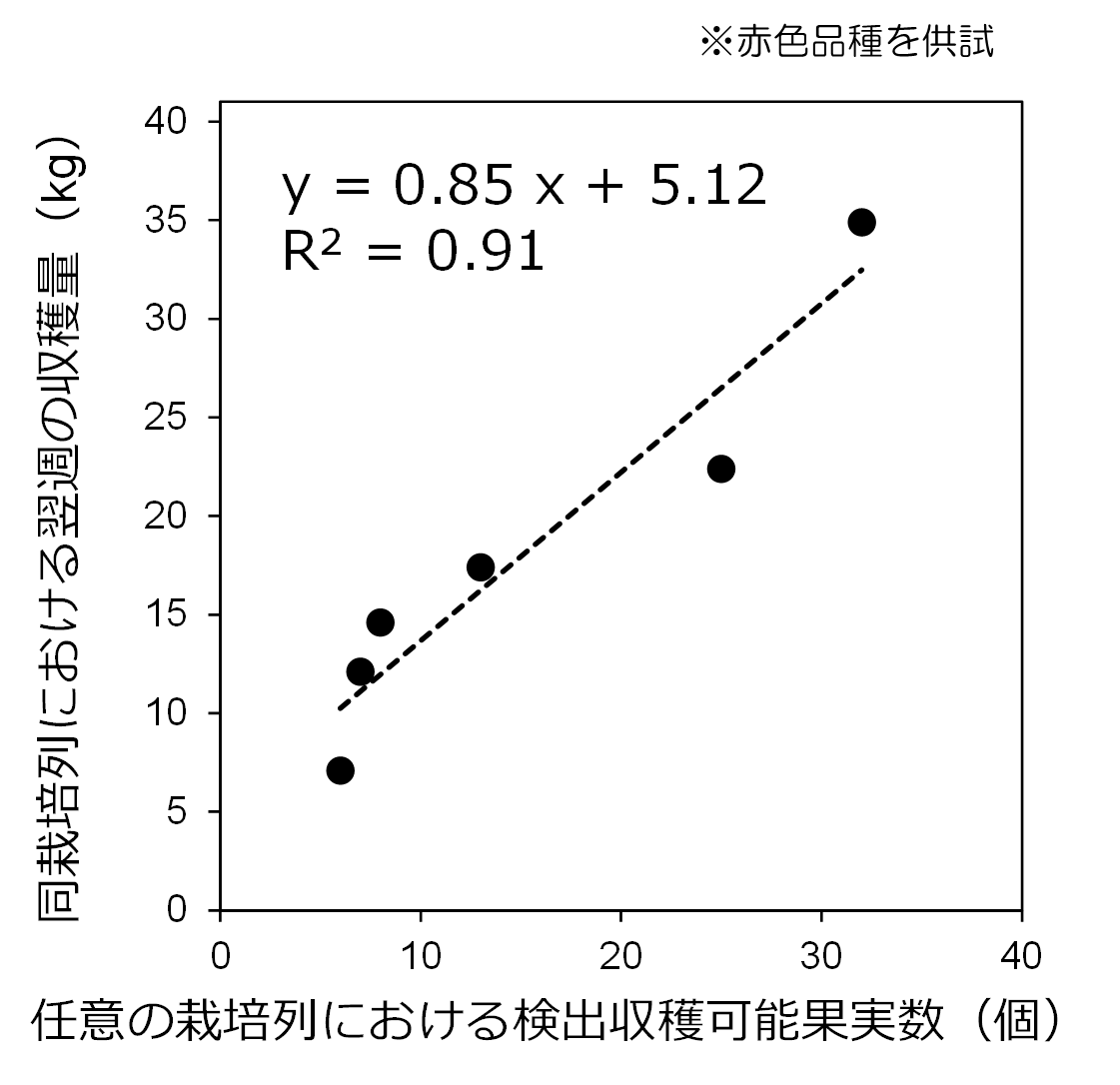
図2 パプリカ用装置(左)及び検出収穫可能果実数と翌週の収穫量との関係(右)
注)試験は(株)タカヒコアグロビジネス 愛彩ファーム九重にて実施した。


