次世代通信ネットワークを用いた遠隔ロボット手術の実現に向け産官学が連携して実証実験施設を立ち上げ
2021-04-16 神戸大学,株式会社 NTT ドコモ,株式会社メディカロイド,神戸市
国立大学法人神戸大学(以下、神戸大学)、株式会社 NTT ドコモ(以下、ドコモ)、株式会社メディカロイド(以下、メディカロイド)は、内閣府の「地方大学・地域産業創生交付金事業」として採択された神戸市の「神戸未来医療構想」の枠組みにおいて、次世代通信ネットワークを用いた遠隔ロボット手術の実現に向け、最先端のネットワーク環境や医療機器を設置した実証実験施設「プレシジョン・テレサージェリーセンター(以下、本施設)」を立ち上げ、本施設において商用 5G を介した国産手術支援ロボット「hinotoriTM サージカルロボットシステム(以下、hinotoriTM)」※1 の遠隔操作の実証実験(以下、本取り組み)を実施しました。なお、商用 5G ネットワークを介した手術支援ロボットの遠隔操作の実証実験は世界初※2 と考えられます。
本取り組みは、ネットワークを介して手術支援ロボットで治療を行う「遠隔ロボット手術」において、熟練医による地方の外科手術や、地方の若手外科医の遠隔指導・遠隔支援など、遠隔からも医療ができる仕組みをつくることで、地方の外科医療の改善に向けた一助となり、日本の外科医療が均てん化することをめざしています。
今回、メディカロイド製の国産初の手術支援ロボット「hinotoriTM」※1 と、ドコモの商用 5G とクラウドサービス「ドコモオープンイノベーションクラウドⓇ」※3 および「クラウドダイレクト TM」※4 を用いて、神戸医療産業都市(兵庫県神戸市)にある神戸大学医学部附属病院 国際がん医療・研究センター(ICCRC)と、統合型研究開発・創出拠点(MeDIP)の二拠点間で、遠隔操作に必要な高精細な手術映像(3D)とロボットの制御信号をリアルタイムに伝送し、ICCRC 側の「サージョンコックピット」※5 の遠隔操作により MeDIP 側の「オペレーションユニット」※6で模擬手術を行う実証実験に成功しました。
本取り組みは、商用 5G と「hinotoriTM」※1 を用いた「遠隔ロボット手術」の前段階として位置づけられている(図 1)、遠隔にいる熟練のロボット外科医の操作支援を受けながら執刀医が手術支援ロボットを用いて施術する「遠隔ロボット手術支援」(図 2)の実現をターゲットとして、技術的な課題の洗い出しを行い、開発を加速させることを目的としています。

左側:ICCRC 側の「サージョンコックピット」※5 を遠隔操作している様子
右側:MeDIP 側の「オペレーションユニット」※6で模擬手術をしている様子
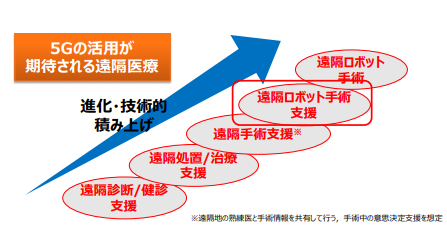
図 1: 遠隔医療におけるステップ
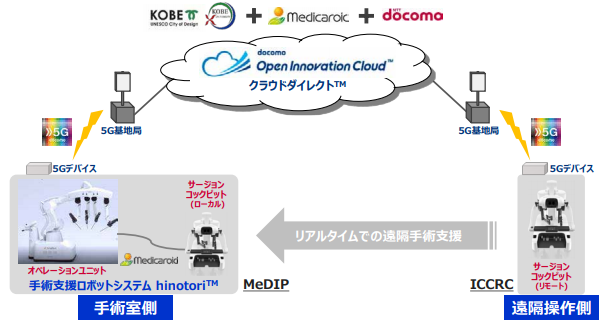
図 2: 手術支援ロボットを活用した遠隔手術支援の概念図
また本取り組みの舞台となる本施設は、2021 年 2 月に ICCRC および MeDIP 内に、手術支援ロボット「hinotoriTM」※1 と、商用 5G 環境の設置を進め、「遠隔ロボット手術」の実現に向けて、産学官が連携した国内初※7 の実証実験施設であり、次世代通信ネットワークを用いた遠隔医療の実現に寄与するさまざまな診断・治療機器の開発拠点になることをめざしています。
神戸大学、ドコモ、メディカロイド、神戸市は、商用 5G をはじめ次世代通信ネットワークを用いることで、低コストで汎用性のある「遠隔ロボット手術」の実現に向けて取り組んでまいります。また、本技術の実用化には、遠隔ロボット手術から遠隔医療全体に関わる法的な問題点の整理や認可に向けた活動が別途必要であり、日本泌尿器内視鏡学会のロボット遠隔手術研究・開発応用委員会などとの議論もあわせて進めてまいります。
4 者は引き続き、「神戸未来医療構想」の枠組みでの取り組みを進めるとともに、神戸医療産業都市に参画している企業をはじめ、全国の関連する企業、大学などとの連携を強化し、日本発の新たなイノベーションの創出をめざしてまいります。
※1 メディカロイド製の手術支援ロボットで、2020 年 8 月に国産初の内視鏡手術を支援するロボットとして製造販売承認を取得。同年 12 月に 1 例目の手術を実施、成功して以降、使用症例を増やしております。「hinotoriTM」の詳細は、別紙を参照ください。
※2 ドコモ調べ(2021 年 4 月 16 日現在)。
※3 ドコモのクラウドサービスで、5G 時代に求められる MEC (Multi‐access Edge Computing)の特長である、低遅延、高セキュリティなどの機能を持っています。
※4 ドコモが提供する接続端末とクラウド基盤を直結して通信経路を最適化することで、5G による低遅延・高セキュリティ通信を実現するサービスです。
※5 手術支援ロボット「hinotoriTM」のユニットの一つで、執刀医が 3D ビューアをのぞき込みながら、手や足の操作で 3D ビデオスコープやインストゥルメントを操作する装置です。詳細は、別紙を参照ください。 ※6 手術支援ロボット「hinotoriTM」のユニットの一つで、サージョンコックピットの操作で、実際の手術をおこなう装置です。詳細は、別紙を参照ください。
※7 神戸大学調べ(2021 年 4 月 16 日現在)。
*「hinotori」は、株式会社メディカロイドの商標です。
*「ドコモオープンイノベーションクラウド」「クラウドダイレクト」は、株式会社 NTT ドコモの商標または、登録商標です。
〔動画 URL:ドコモ公式 YouTube https://youtu.be/mSRq6qksLqA〕
本件に関する報道機関からのお問い合わせ先
株式会社 NTT ドコモネットワークイノベーション研究所
神戸大学総務部広報課
株式会社メディカロイド経営企画部
神戸市医療・新産業本部医療産業都市部調査課
手術支援ロボット「hinotoriTM」の概要
近年、外科手術においては、身体への負担を軽減する低侵襲手術が進展し、そのための手術支援ロボットのニーズが拡大しています。わが国は、世界屈指のロボット大国で、産業用ロボットでは世界市場の半分以上のシェアを持っているにもかかわらず、国産の手術支援ロボットは、上市されていませんでした。メディカロイドは、こうした国産の手術支援ロボットへの期待にお応えするために、“人とロボットの共存”をコンセプトに、医療用ロボットの開発を推進してきました。そして 2020 年 8 月に手術支援ロボットシステム「hinotoriTM サージカルロボットシステム」が、国産としては初めて製造販売承認を取得しました。まずは、日本市場にて泌尿器科を対象に市場導入を行っております。
「hinotoriTM」は、オペレーションユニット、サージョンコックピット、ビジョンユニットの 3 ユニットで構成されます。手術を実施するオペレーションユニットのアームは、ヒトの腕に近いコンパクトな設計で、アーム同士やアームと助手の医師との干渉を低減し、より円滑な手術が可能となることが期待されます。サージョンコックピットは、執刀医の姿勢にあわせることが可能なように人間工学的な手法で設計されています。執刀医の負担を軽減し、ストレスフリーな手術をサポートします。ビジョンユニットは、サージョンコックピットに高精細な内視鏡画像を 3D で映し出すとともに、執刀医と助手の医師との円滑なコミュニケーションをサポートできる設計となっています。

【製品の外観】
左側:オペレーションユニット 右側:サージョンコックピット

