
2023-10-18 ノースカロライナ州立大学(NCState)
◆プロトタイプデバイスはEMG信号に応答し、切断患者は通常のプロステティックと比較して明らかにより安定し、自然な姿勢制御を実現できました。この技術は切断患者にとって有用であり、今後の研究でさらなる検証が行われる予定です。
<関連情報>
- https://news.ncsu.edu/2023/10/robotic-ankles-move-naturally/
- https://www.science.org/doi/10.1126/scirobotics.adf5758
- https://www.cambridge.org/core/journals/wearable-technologies/article/direct-continuous-electromyographic-control-of-a-powered-prosthetic-ankle-for-improved-postural-control-after-guided-physical-training-a-case-study/B97FE01247EFB1B98C8D7396DAF8F60C
神経義足制御により、立位姿勢制御におけるニューロメカニクスがほぼ正常に復元される Neural prosthesis control restores near-normative neuromechanics in standing postural control
Aaron Fleming,Wentao Liu,He (Helen) Huang
Science Robotics Published:18 Oct 2023
DOI:https://doi.org/10.1126/scirobotics.adf5758
")
Abstract
Current lower-limb prostheses do not provide active assistance in postural control tasks to maintain the user’s balance, particularly in situations of perturbation. In this study, we aimed to address this missing function by enabling neural control of robotic lower-limb prostheses. Specifically, electromyographic (EMG) signals (amplified neural control signals) recorded from antagonistic residual ankle muscles were used to drive a robotic prosthetic ankle directly and continuously. Participants with transtibial amputation were recruited and trained in using the EMG-driven robotic ankle. We studied how using the EMG-controlled ankle affected the participants’ anticipatory and compensatory postural control strategies and stability under expected perturbations compared with using their daily passive devices. We investigated the similarity of neuromuscular coordination (by analyzing motor modules) of the participants, using either device in a postural sway task, to that of able-bodied controls. Results showed that, compared with their passive prosthesis, the EMG-controlled prosthesis enabled participants to use near-normative postural control strategies, as evidenced by improved between-limb symmetry in intact-prosthetic center-of-pressure and joint angle excursions. Participants substantially improved postural stability, as evidenced by a reduction in steps or falls using the EMG-controlled prosthetic ankle. Furthermore, after relearning to use residual ankle muscles to drive the robotic ankle in postural control, nearly all participants’ motor module structure shifted toward that observed in individuals without limb amputations. Here, we have demonstrated the potential benefit of direct EMG control of robotic lower limb prostheses to restore normative postural control strategies (both neural and biomechanical) toward enhancing standing postural stability in amputee users.
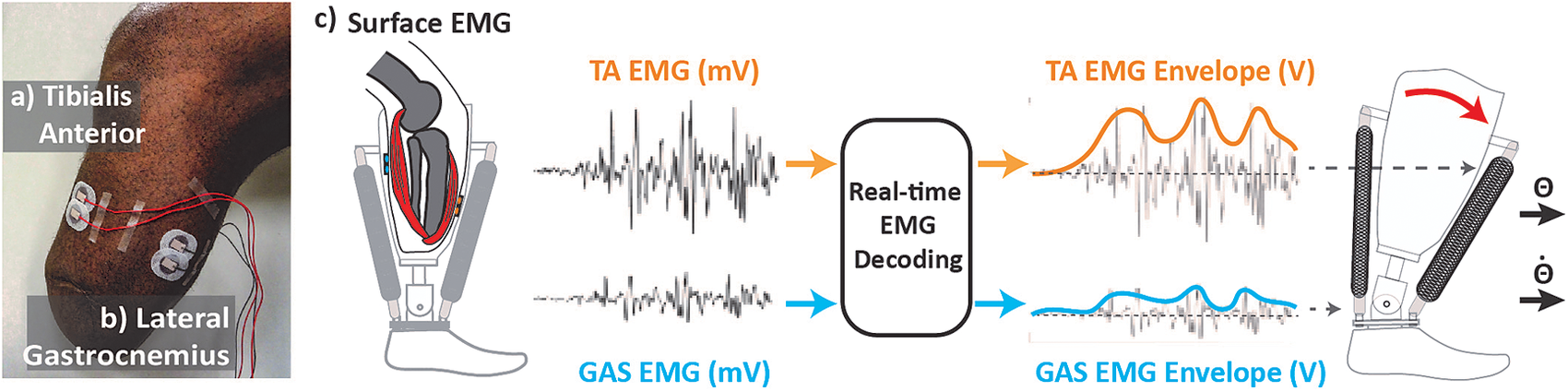
誘導された身体訓練後の姿勢制御を改善するための動力付き義足足首の直接的連続筋電図制御: ケーススタディ Direct continuous electromyographic control of a powered prosthetic ankle for improved postural control after guided physical training: A case study
Aaron Fleming,Stephanie Huang,Elizabeth Buxton,Frank Hodges and He Helen Huang
Wearable Technologies Published:12 April 2021
DOI:https://doi.org/10.1017/wtc.2021.2
Abstract
Despite the promise of powered lower limb prostheses, existing controllers do not assist many daily activities that require continuous control of prosthetic joints according to human states and environments. The objective of this case study was to investigate the feasibility of direct, continuous electromyographic (dEMG) control of a powered ankle prosthesis, combined with physical therapist-guided training, for improved standing postural control in an individual with transtibial amputation. Specifically, EMG signals of the residual antagonistic muscles (i.e. lateral gastrocnemius and tibialis anterior) were used to proportionally drive pneumatical artificial muscles to move a prosthetic ankle. Clinical-based activities were used in the training and evaluation protocol of the control paradigm. We quantified the EMG signals in the bilateral shank muscles as well as measures of postural control and stability. Compared to the participant’s daily passive prosthesis, the dEMG-controlled ankle, combined with the training, yielded improved clinical balance scores and reduced compensation from intact joints. Cross-correlation coefficient of bilateral center of pressure excursions, a metric for quantifying standing postural control, increased to .83(±.07) when using dEMG ankle control (passive device: .39(±.29)). We observed synchronized activation of homologous muscles, rapid improvement in performance on the first day of the training for load transfer tasks, and further improvement in performance across training days (p = .006). This case study showed the feasibility of this dEMG control paradigm of a powered prosthetic ankle to assist postural control. This study lays the foundation for future study to extend these results through the inclusion of more participants and activities.

")
")