
高効率な海中・海底観測のための新しい海面基地としてのUAV
2021-10-20 東京大学
○発表者:
横田 裕輔(東京大学 生産技術研究所 海中観測実装工学研究センター 准教授)
松田 匠未(明治大学 理工学部 専任講師)
○発表のポイント:
◆海中・海底観測機器を現地まで運び、機器と情報を通信する海面基地として、これまで船舶が活用されてきた。しかし、コストが大きく機動性が低いという課題があった。
◆無人航空機による観測機器支援の実証試験を行った結果、船舶に比べ、コストと時間が大幅に低減し、海面の位置決定の精度も高く、海中音響ノイズも低減することが判明した。
◆無人航空機が、沿岸域の海中・海底調査の海面基地として大きな利点を持つことを示した。また、無人航空機の長時間の運用を可能とする機体性能や動力源の開発と、運搬を可能とするための観測機器の軽量化が、今後の重要な課題であることを示した。
○発表概要:
東京大学 生産技術研究所 海中観測実装工学研究センターの横田 裕輔 准教授と明治大学理工学部の松田 匠未 専任講師は、無人航空機(UAV:Unmanned Aerial Vehicle)を自律型無人潜水機(AUV:Autonomous Underwater Vehicle)などの自律的な海中・海底観測機器の母船として運用することで、高効率・高機動的な機器運用を可能とすることを目指し、実証試験を行いました。
海中・海底を自律的に調査する機器の位置決定・通信は、沿岸・港湾調査などの多くの海洋産業において欠かせません。そのため、音響通信によって観測機器と海面基地が情報を通信する必要があります。これまでの海面基地のほとんどは船舶であり、大きなコストや機動性の不足が観測の広範化や汎用化のボトルネックとなっていました。機体・燃料コストが低く、人的・時間的コストも非常に低い点から、ドローンを海面基地として利用することが期待されていますが、実証事例が圧倒的に不足しているのが現状です。
本研究グループは、昨年来UAVの開発を進めており、海面でのブイのような計測や海中計測の可能性を実証してきました。本研究では、その発展として、AUVなどの海中・海底観測機器との通信やその母船としての作業の実証試験を行いました。その結果、海面基地型UAV同士を沿岸域で通信させ、200m程度の通信が実現されていることを確認しました。その機体保持精度や海中音響ノイズの少なさの面でも船舶等による機器の運用よりも優れていることが示され、UAVを利用した、沿岸域の海中・海底調査の大きな利点を示しました。
また本研究では、長時間の運用を可能とするUAVの機体性能や動力源の開発と、運搬を可能とするための観測機器の軽量化が、今後の高効率なUAV海中・海底観測において重要な研究課題であることが示唆されました。
○発表内容:
<研究の背景>
さまざまな海中・海底調査にAUVなどの自律的な機器が使われるようになり、従来よりも大幅に観測精度や効率が向上しました。しかし、陸域での情報取得に比べると時間効率性もコストも大幅に劣っているのが現状です。この問題のボトルネックは海面基地にあります。
AUVをはじめとする海中・海底観測機器の投入・回収、観測中の通信は昔も今も船舶で行われます。船舶は多くの機材を積むことができ、人が現場で作業する上でも欠かすことのできない海面基地です。しかし、事前準備や海面を移動することで時間・燃料コストがかかり、多くの人的コストや維持コストもかかります。簡易的・少人数で観測機器との通信を実現し、船舶とは異なる新しい海中・海底観測基地が必要なのです。
一方陸域では、機体・燃料コストが低く人的・時間コストが非常に低い自律型航空機(UAV)の利用が、物流・測量などの多様な分野で急速に進展しています。しかし、民間などでのUAVの利用が始まって5年以上が経過した現在においても、海中・海底観測のための基地としての活用は実証事例が圧倒的に不足しているのが現状です。
本研究グループは、昨年来、海面でブイのように計測を可能とするUAVおよび海中計測を可能とするUAVの開発を行ってきました。本研究では、その発展として、AUVなどの海中・海底機器との通信やその母船としての作業の実証実験を行いました。
<研究の内容>
東京大学 生産技術研究所 海中観測実装工学研究センターの横田 裕輔 准教授、明治大学理工学部の松田 匠未 専任講師は、株式会社プロドローンと連携し、AUVなどとの海面通信基地としてのUAVの実証に関する共同研究を実施しました。AUVなどの海中・海底観測機器の位置決定・通信の基地としてUAVを活用する方法は図1のように複数あり、本実験では、海中・海底機器との通信能力とその高効率性を実証するために、(a)および(c)のように海中音響通信機器をロープで吊るしたUAVを2機用意し、20~200mの距離を徐々に離して位置決定精度を検証しました。実験の様子は図2、動画に示されています。
合計わずか10分程度の観測時間で、図3のような観測誤差で位置決定され、2~3m程度の誤差範囲に収まっていることが確認されました。この誤差は表面波・流れが卓越しやすい海面環境においては海中位置決定精度としては高い水準であり、図1のような観測行動を高効率かつ高精度に実施できることが示されています。また、UAVは船舶とは異なり海中音響ノイズをほぼ発生させない点でも優れていることが確認できました。
また、本研究は将来のUAV海中・海底観測において、2点の新しい研究課題を示しています。1点目は、観測行動の長時間化です。現在のUAVは電池の高度化に限界があり、1時間程度の長時間計測を安定して行うことが難しい状況です。電池などの改良によって長時間の海中・海底観測を実現するための研究開発の必要性を示しています。2点目は、図1(e, f)のような海洋における物品の運搬能力の獲得です。海中・海底観測機器は沈める前提であり、大きな重量を持たせています。UAV運搬を可能とするためにはこの重量を軽減しなければならず、これまでの海洋機器の開発の方向性とは異なる研究の必要性を示唆しています。
○発表雑誌:
雑誌名 :「Remote Sensing」
論文タイトル:Underwater communication using UAVs to realize high-speed AUV deployment
著者 :Yusuke Yokota and Takumi Matsuda
DOI番号 :10.3390/rs13204173
○問い合わせ先:
東京大学 生産技術研究所 海中観測実装工学研究センター
准教授 横田 裕輔(よこた ゆうすけ)
E-mail:yyokota(末尾に”@iis.u-tokyo.ac.jp”をつけてください)
○用語解説:
(注1)GNSS
「GPS」や「みちびき」などの衛星を利用した測位観測システム
○添付資料

図1 (a, b) AUV通信のためのUAV海面基地の模式図。 (c, d) 海中機器による計測・通信のためのUAV海面基地の模式図。 (e, f) AUVなどの投入・回収行動を行うUAV海面基地の模式図。
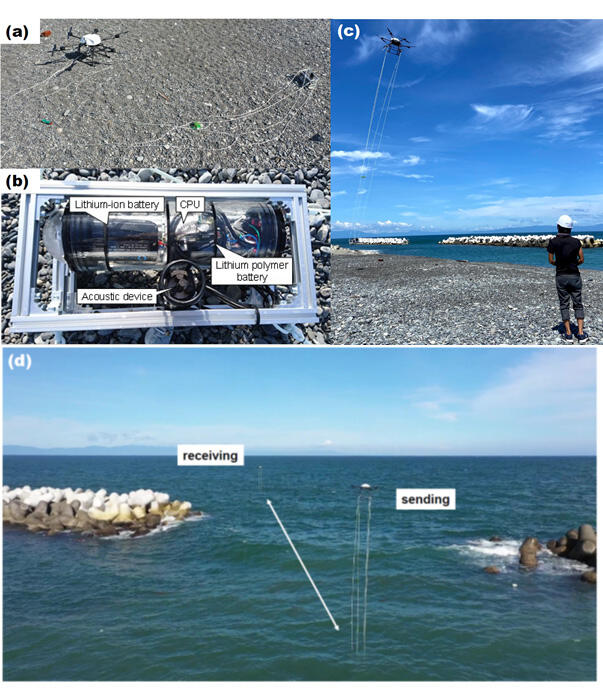
図2 (a) 海中音響機器をロープで接続した様子。1点吊りでは水中装置の向きを維持できないため,絡まらず安定した4点吊りにより機器を捕捉した。装置を投入する深さを調整する目的で10m 近い長さのロープを用いている。 (b) 海中音響機器。 (c) UAVの飛行。 (d) 観測中のUAV。
(動画:観測の様子)
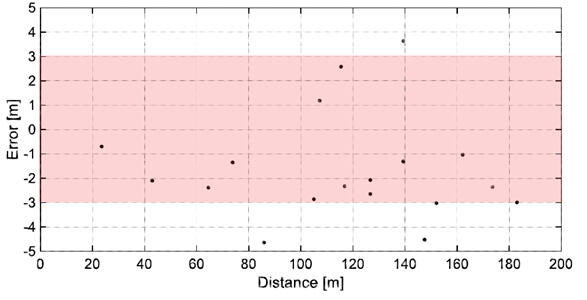
図3 20~200mまでの2機のUAVの距離を計測した際の誤差(1周波GNSS(注1)記録と海中音響通信結果の差)。赤色範囲:誤差3mの幅。


