(Stretchable sensor gives robots and VR a human touch)
2020/11/12 アメリカ合衆国・コーネル大学

・ コーネル大学が、低コスト LED と染料を統合したファイバー・オプティック(光ファイバー)センサーを開発。ストレッチャブルな「皮膚」として、圧力や曲げ、歪み等の変形を検出し、哺乳類の持つような触感覚をロボティックシステムや VR 技術に付与する可能性が期待できる。
・ 同センサーは、2016 年に同大学が開発した光導波路を通過する光の強度の変化で材料の変形を検出するストレッチャブルセンサーがベース。以降、同大学ではオプティカルレースや発泡体等のセンサー材料を開発している。
・ 今回開発のセンサーでは、シリカベースの分布型ファイバー・オプティックセンサー(distributed
fiber-optic sensor: DFOS)を活用し、微小な波長の変化から湿度、温度や歪み等、複数の特性を検出するが、シリカ繊維は柔らかくストレッチャブルなエレクトロニクスとの適合性に欠ける。
・ そのため、「マルチモードセンシングのためのストレッチャブルな光導波路(strechable lightguide for
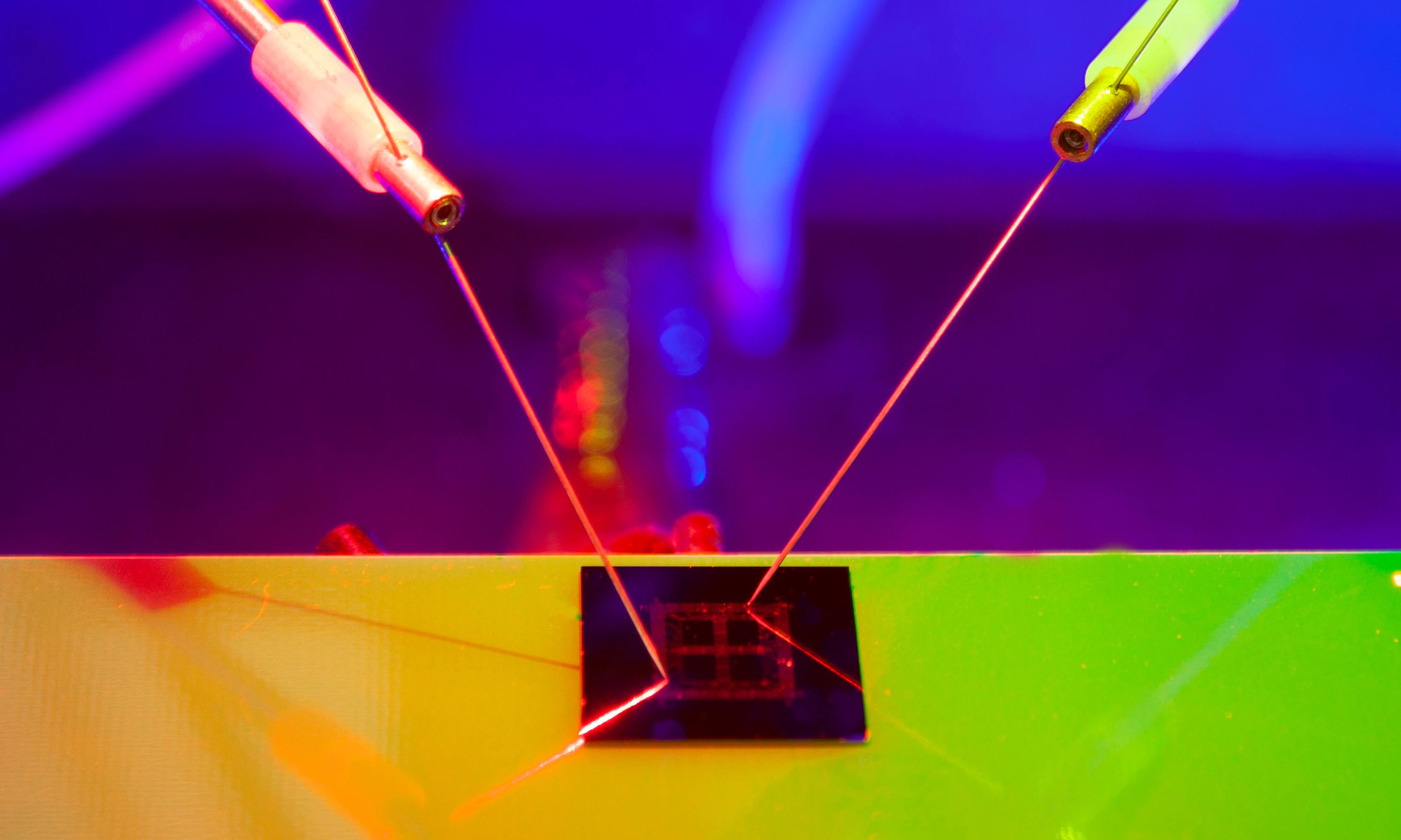
multimodal sensing: SLIMS)」を使用してこの問題を解決。SLIMS は、1 対のポリウレタン弾性コアを含有する長いチューブ。一方のコアは透明で、もう一方は吸収染料を含有し LED に接続される。各コアは赤色・緑色・青色のセンサーチップにつながっていて、光の経路での変化を示す。
・ このデュアルコア設計により、センサーが検出する圧力、曲げや伸び等の変形のアウトプット数を増やし、変形箇所の範囲をリアルタイムに示す染料のライトアップが場所のエンコーダーとして機能する。これを数理モデルと組み合わせることで、変形を区別し、それらの場所と強度を正確に特定する。
・ SLIMS センサーでは、通常 DFOS では必要な高解像度検出機器に代わり、低解像度の小型オプトエレクトロニクスが利用できるため、より安価で簡易な製造と小型システムへの容易な統合が可能。例えば、滑りの検出にロボットハンドに組み入れることができる。
・ また、ウェアラブルでの利用も可能。3D プリント作製した手袋の各指に SLIMS センサーを配置し、リチウム電池を電源として使用し、手袋の動きと変形をリアルタイムに再構築する別途開発のソフトウェアに Bluetooth でデータを送信する。
・ 米国立科学財団(NSF)の Corps(I-Corps)プログラムによる同技術の商用化の可能性を調査し、同大学の Center for Technology Licensing を通じ、理学療法やスポーツ医学でのアプリケーションに向け特許出願中。両分野では動作追跡技術を利用しているが、これまでは相互作用力を捉える機能が欠けていた。
・ 本研究は、NSF、米国空軍科学研究所(AFOSR)、Cornell Technology Acceleration and Maturation、米国農務省(USDA)の国立食料農業研究所(NIFA)および米国海軍研究局(ONR)が支援した。
URL: https://news.cornell.edu/stories/2020/11/stretchable-sensor-gives-robots-and-vr-humantouch
<NEDO海外技術情報より>
(関連情報)
Science 掲載論文(アブストラクトのみ:全文は有料)
Stretchable distributed fiber-optic sensors
URL: https://science.sciencemag.org/content/370/6518/848
Abstract
Silica-based distributed fiber-optic sensor (DFOS) systems have been a powerful tool for sensing strain, pressure, vibration, acceleration, temperature, and humidity in inextensible structures. DFOS systems, however, are incompatible with the large strains associated with soft robotics and stretchable electronics. We develop a sensor composed of parallel assemblies of elastomeric lightguides that incorporate continuum or discrete chromatic patterns. By exploiting a combination of frustrated total internal reflection and absorption, stretchable DFOSs can distinguish and measure the locations, magnitudes, and modes (stretch, bend, or press) of mechanical deformation. We further demonstrate multilocation decoupling and multimodal deformation decoupling through a stretchable DFOS–integrated wireless glove that can reconfigure all types of finger joint movements and external presses simultaneously, with only a single sensor in real time.