
2022-02-15 理化学研究所
理化学研究所(理研)情報統合本部ガーディアンロボットプロジェクト人間機械協調研究チームの古川淳一朗研究員、同ガーディアンロボットプロジェクト森本淳客員主管研究員らの共同研究グループは、膝関節に着ける軽量の「装着型アシストロボット」を開発し、装着者の動作意図を推定することで適切な運動を支援する手法を提案しました。
本研究成果は、ロボットを活用した支援技術として、今後ますます進行する超高齢社会に貢献するものと期待できます。
今回、共同研究グループは、カーボン樹脂でできたフレームに空気圧人工筋アクチュエーターを内蔵することで、軽量の外骨格型の装着型アシストロボットを作製しました。このロボットの制御手法として、装着者から計測される筋活動と関節運動の情報に基づき、装着者の意図した動作に合わせた適切な制御則[1]により駆動させるアルゴリズムを開発しました。これは、部分的にラベル付け[2]された情報から装着者の動作意図を精度よく判別する「機械学習[3]技術」と、制御目的を達成するための制御入力をヒトの身体特性を考慮した評価関数[4]に基づいて計算する「最適制御技術」を組み合わせることで実現しました。
本研究は、科学雑誌『IEEE Robotics and Automation Letters』オンライン版(2月7日付)に掲載されました。

開発した装着型アシストロボット(黒の部分)を両足に装着したマネキン
背景
超高齢社会への対応策の一つとして、ヒトの運動を物理的に支援する「装着型アシストロボット」の研究開発が世界中で行われています。少し前まで、ハードウェアは大きくて重く、支援の対象となる動作は低速な歩行動作や荷物を持ち上げるなど静的で単一なものに限られていました。しかし、近年ハードウェアの軽量化が進み、かつ多様な動作に対応することが可能になりつつあります。
アシストロボットの駆動に関して、装着者の動作意図を生体信号のセンサー情報(筋電図[5])から推定して制御する手法が注目されています。しかし、現状では対応できる動作の数が少ないため、多様な動作に対応する動作意図推定が必要です。
一般的に、動作意図を推定するには、あらかじめ支援対象となる動作についてラベル付けしたデータに基づいて、パラメータが学習された推定器[3]を利用します。そのため、装着者はあらかじめ設定した動作のいずれかを行うことが前提になっています。例えば、椅子からの立ち上がり動作を支援対象とする場合は、まず着座姿勢を「座っている」状態とラベル付けし、次に体幹が傾き始めてからアシストロボットによる支援が必要な状態を「立位動作」状態とラベル付けすることで、推定器はセンサー情報からどちらかの状態を予測します。
このとき、座っている状態から立ち上がり動作を行うだけであれば、さほど問題はありません。しかし、少し遠くにある物を取るために体幹を傾けて腕を伸ばしたり座り直したりするように、立ち上がり動作の周辺には紛らわしい動きが多々潜在しています。従来の方法では、学習時のいずれかのラベルを推定値として出力するため、支援対象ではない動作に対してもアシストロボットが支援対象と見なし、作動してしまう可能性がありました。
一方で、行動の多様性を考えると、ヒトの動作データ全てに正確なラベル付けをすることは困難です。そのため、従来のアシストロボットは限定的な動作を想定し、装着者はその想定動作以外は行えないという制約がありました。しかし、ヒトの日常的な行動からすると、ラベルの付いていない紛らわしい動作をする状況下においても、支援の対象となる動作意図を精度よく推定し、適切な制御量での支援が必要です。
研究手法と成果
共同研究グループは、株式会社国際電気通信基礎技術研究所(ATR)の研究グループが開発した「空気圧人工筋アクチュエーター」をカーボン樹脂でできたフレームに内蔵することで、膝関節を支援する外骨格型の装着型アシストロボットを開発しました(下図左)。開発したアシストロボットは、片足810グラムと軽量でありながら、最大で52ニュートンメートル(Nm)の高トルク(回転させる力)を出力できます。
次に、開発したアシストロボットを駆動させるために、さまざまな動作の中でいくつかの動きを支援する選択的支援のアルゴリズムを提案しました。このアルゴリズムは、装着者から取得する筋活動と関節運動のセンサー信号から支援対象とする動作意図を精度よく推定する「機械学習技術」と、対象動作に対し個人に合わせた適切な量で支援可能な制御則を導出する「最適制御技術」を組み合わせることで実現しました。
取得するセンサー信号から支援対象者の動作意図を検出するために、PU-ラーニング(Positive and Unlabeled Learning)[6]という機械学習の枠組みを援用しました。支援の対象動作とそれに関連して可能性のある紛らわしい動作データを取得し、その一部に支援対象となるポジティブラベル[6]を付け、他のデータに対してはラベルを付けないで学習させることで推定器を作成しました。これにより、紛らわしい動作が起こる状況下でも、支援の対象動作となる動作意図推定を精度よく行うことができます。
支援対象動作に対する制御則(πtarget)は、最適制御技術の一つであるiLQG(iterative Linear-Quadratic-Gaussian)[7]という手法で導出しました。装着者の身長や体重などの身体情報を基に、物理シミュレータ上でヒトの多関節近似モデルを構築し、このモデルに対しあらかじめ取得した支援対象の動作軌道に従うように設定した評価関数を最適化することで制御戦略を算出します(下図右)。これにより、実際の支援対象動作に発生する関節トルクの近似値が得られます。装着者の動作意図がポジティブと推定された場合は、支援対象動作に対するπtargetでロボットを駆動させ、ポジティブではないと推定された場合は、装着者の動きを妨げないようにロボットの重さを常に打ち消すπotherで駆動させます(下図右)。
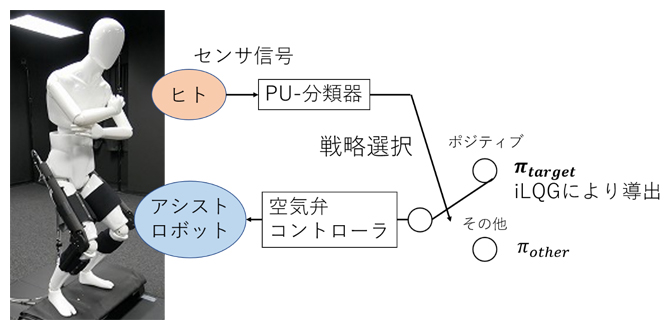
図 装着者の動作意図を推定し適切な運動を支援するアルゴリズムの概要
PU-ラーニングで構築された動作分類(PU-分類器)から適切な制御戦略を選択する。支援対象の動作に関しては、最適制御技術iLQGを用いて制御戦略を算出する。装着者の動作意図がポジティブと推定された場合は、支援対象動作に対するπtargetでロボットを空気弁コントローラにより駆動させ、ポジティブではないと推定された場合は、装着者の動きを妨げないようにロボットの重さを常に打ち消すπotherで駆動させる。
被験者数名の協力を得て動作支援実験を行い、開発した装着型アシストロボットの制御手法の有効性を検証しました。実験設定では、支援対象は椅子からの「立ち上がり」動作とし、そのほかに「脚を組む」「少し離れた物に手を伸ばして取る」「座り直す」の動作が起こり得る状況を想定しました。また、装着者からは筋活動と関節角度のデータを取得し、その情報に基づき提案アルゴリズムによってロボットを駆動させました。
その結果、立ち上がり動作に対しては100%の確率でπtargetが選択され、他の動作に対しては83.4%の確率でπotherが選択され、ロボットが駆動することが分かりました。一方、支援対象以外の動作をヒトは行わないとする従来のアプローチ(従来手法1)だと、立ち上がり動作に対し100%の確率でπtargetが選択されましたが、他の動作に対しては19.8%の確率でπotherが選択されました。また、支援対象以外の動作に対してネガティブラベル[6]を付けたデータにより推定器を学習させる従来のアプローチ(従来手法2)では、立ち上がり動作に対し34%の確率でπtargetが、他の動作に対しては94%の確率でπ_otherが選択されました。
さらに、支援対象の立ち上がり動作に対してロボットによる支援が装着者に伝わったかを力センサーの値により比較したところ、提案手法と従来手法1は、従来手法2に比べて優位に支援量が伝わっていることが分かりました。また、他の動作を行ったとき、ロボットが装着者の動きを妨げたかを本来の関節軌道との誤差により比較したところ、提案手法と従来手法2は、従来手法1に比べて誤差が小さいことが分かりました。これらの結果から、従来手法1と2に比べて、今回の提案手法では精度よく装着者の動作意図を推定しており、開発した装着型アシストロボットによる支援の有効性を確認しました。
今後の期待
本研究では、軽量でありながら力強くヒトの運動を支援する装着型アシストロボットを開発するとともに、筋活動情報を含むセンサー信号から推定したヒトの動作意図に基づき、適切に制御方策を選択し駆動させるアルゴリズムを提案しました。
このアルゴリズムは、一部のデータに対してだけ分類情報が整理されている状況においても、装着者の動作意図を精度よく推定し適切に運動を支援できます。そのため、今後、ウェアラブルセンサーが普及することでより多様なヒトの運動データを収集可能になれば、情報を利活用したロボットによるヒトのさらなる支援技術に貢献すると期待できます。
また、年齢にかかわらず意欲・能力を生かして活躍できるエイジレス社会に向けた技術として有効だと考えられます。
補足説明
1.制御則
制御の目的を達成するために、制御対象に加える量を決める基準となる法則。
2.ラベル付け
データに正解となる分類情報を付与すること。推定器などのパラメータを学習する際の手本となる。
3.機械学習、推定器
機械学習とは、コンピュータが自動でデータのルールやパターンを見つけ出す手法。新たなデータに対して見つけ出したルールやパターンを当てはめることで結果を推定できる。ラベル付けされたデータに基づきルールやパターンを見つけ出し分類する場合は教師あり学習と呼ばれる。推定器は具体的な手法を指し、データの特性や用途に合わせて選ぶことが望ましい。
4.評価関数
結果の望ましさを自由変数の関数として実数値で表したもの。この関数の出力値により性能を評価する。
5.筋電図
電極(センサー)を用いて、筋肉で発生する微弱な電気的活動を捉えたもの。
6.PU-ラーニング(Positive and Unlabeled learning)、ポジティブラベル、ネガティブラベル
PU-ラーニングは、取得したデータにおいて一部にポジティブラベル(正例のラベル)が付されており、その他はラベルの付いていない状況で推定器を学習する機械学習手法。学習データの全てにポジティブラベルまたはネガティブラベル(負例のラベル)が付いていない状態でも、対象となるポジティブラベルを精度よく判別する。
7.iLQG(iterative Linear-Quadratic-Gaussian)
最適制御技術の一つ。最適制御とは、制御目的を表す量として設定された評価関数を最小化するような制御入力を求める手法であり、iLQGはこの問題を非線形なシステムに対応させる。
共同研究グループ
理化学研究所
情報統合本部 ガーディアンロボットプロジェクト
人間機械協調研究チーム
研究員 古川 淳一朗(ふるかわ じゅんいちろう)
客員主管研究員 森本 淳(もりもと じゅん)
(株式会社国際電気通信基礎技術研究所(ATR) 脳情報研究所 ブレインロボットインタフェース研究室 室長)
(京都大学 大学院情報学研究科 教授)
脳神経科学研究センター理研CBS-トヨタ連携センター
知能行動制御連携ユニット
研究員 岡島 正太郎(おかじま しょうたろう)
九州大学大学院 システム情報科学研究院
准教授 アン・チ(Qi An)
京都大学 学術情報メディアセンター
教授 中村 祐一(なかむら ゆういち)
研究支援
本研究は、理化学研究所運営費交付金(ガーディアンロボットプロジェクト)で実施し、理研-九大共同研究プログラムの研究課題「高齢者の運動機能改善のための個人に合わせた適応的な動作支援システムの開発(理研代表者:古川淳一朗、九大代表者:Qi An)」、日本学術振興会(JSPS)科学研究費補助金若手研究「状況に応じた適切動作へと導く外骨格型ロボット制御手法の開発(研究代表者:古川淳一朗)」、同基盤研究(A)「自信を持たせる動作支援:動作予測と体性感覚呈示とモニタリングによる柔らかい支援(研究代表者:中村祐一)」による支援を受けて行われました。
原論文情報
Jun-ichiro Furukawa, Shotaro Okajima, Qi An, Yuichi Nakamura, Jun Morimoto, “Selective Assist Strategy by Using Lightweight Carbon Frame Exoskeleton Robot”, IEEE Robotics and Automation Letters, 10.1109/LRA.2022.3148799
発表者
理化学研究所
情報統合本部 ガーディアンロボットプロジェクト 人間機械協調研究チーム
研究員 古川 淳一朗(ふるかわ じゅんいちろう)
ガーディアンロボットプロジェクト
客員主管研究員 森本 淳(もりもと じゅん)
報道担当
理化学研究所 広報室 報道担当
水電解を用いた水素製造へ~")
