
2024-11-18ドイツ連邦共和国・ミュンヘン工科大学 (TUM)
<関連情報>
- https://www.tum.de/en/news-and-events/all-news/press-releases/details/effortless-robot-movements
- https://journals.plos.org/ploscompbiol/article?id=10.1371/journal.pcbi.1011478
- https://arxiv.org/abs/2404.08478
- https://ieeexplore.ieee.org/abstract/document/10054156
リズムを見つける:人間は周期的相互作用タスクにおいてコンプライアントシステムの非線形固有ダイナミクスを利用する Finding the rhythm: Humans exploit nonlinear intrinsic dynamics of compliant systems in periodic interaction tasks
Annika Schmidt ,Marion Forano,Arne Sachtler,Davide Calzolari,Bernhard M. Weber,David W. Franklin,Alin Albu-Schäffer
PLOS Computational Biology Published: September 3, 2024
DOI:https://doi.org/10.1371/journal.pcbi.1011478
Abstract
Activities like ball bouncing and trampoline jumping showcase the human ability to intuitively tune to system dynamics and excite motions that the system prefers intrinsically. This human sensitivity to resonance has been experimentally supported for interactions with simple linear systems but remains a challenge to validate in more complex scenarios where nonlinear dynamics cannot be predicted analytically. However, it has been found that many nonlinear systems exhibit periodic orbits similar to the eigenmodes of linear systems. These nonlinear normal modes (NNM) are computable with a recently developed numerical mode tool. Using this tool, the present resarch compared the motions that humans excite in nonlinear systems with the predicted NNM of the energy-conservative systems. In a user study consisting of three experiment parts, participants commanded differently configured virtual double pendula with joint compliance through a haptic joystick. The task was to alternately hit two targets, which were either aligned with the NNM (Experiments 1 and 2) or purposefully arranged offset (Experiment 3). In all tested experiment variations, participants intuitively applied a control strategy that excited the resonance and stabilized an orbit close to the ideal NNM of the conservative systems. Even for increased task accuracy (Experiment 2) and targets located away from the NNM (Experiment 3), participants could successfully accomplish the task, likely by adjusting their arm stiffness to alter the system dynamics to better align the resonant motions to the task. Consequently, our experiments extend the existing research on human resonance sensitivity with data-based evidence to nonlinear systems. Our findings emphasize the human capabilities to apply control strategies to excite and exploit resonant motions in dynamic object interactions, including possibly shaping the dynamics through changes in muscle stiffness.
Author summary
Without thinking about it, humans intuitively excite resonant motions in everyday object interactions, despite the complex and nonlinear nature of their dynamics. Computing these nonlinear dynamics is challenging, but it is essential to verify if the excited object motion matches the objects’ intrinsic dynamics. Using a new numerical tool, we could predict these intrinsic dynamics. In a human user study, participants were tasked with exciting a virtual double pendulum through a haptic joystick. The excited motions were then compared to the intrinsic nonlinear dynamics predicted by the tool. The experiments verified that participants intuitively excited the resonance frequency of the nonlinear system and stabilized motion trajectories close to the computed intrinsic ones. Experimental variations also indicated that humans shape the system dynamics by changing their arm stiffness to create resonances that better align with the task. These findings support existing research showing that humans are highly sensitive to resonance and exploit it intuitively for tasks when possible.
非線形法線モードによる弱作動二重振り子のスイングアップ Swing-Up of a Weakly Actuated Double Pendulum via Nonlinear Normal Modes
Arne Sachtler, Davide Calzolari, Maximilian Raff, Annika Schmidt, Yannik P. Wotte, Cosimo Della Santina, C. David Remy, Alin Albu-Schäffer
arXiv Submitted on 12 Apr 2024
DOI:https://doi.org/10.48550/arXiv.2404.08478
Abstract
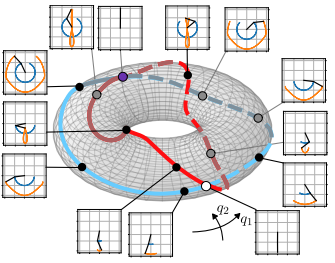
We identify the nonlinear normal modes spawning from the stable equilibrium of a double pendulum under gravity, and we establish their connection to homoclinic orbits through the unstable upright position as energy increases. This result is exploited to devise an efficient swing-up strategy for a double pendulum with weak, saturating actuators. Our approach involves stabilizing the system onto periodic orbits associated with the nonlinear modes while gradually injecting energy. Since these modes are autonomous system evolutions, the required control effort for stabilization is minimal. Even with actuator limitations of less than 1% of the maximum gravitational torque, the proposed method accomplishes the swing-up of the double pendulum by allowing sufficient time.
矢状弾性四脚における準受動的モーダルトロッティングとプロンキングの具現化 Embodying Quasi-Passive Modal Trotting and Pronking in a Sagittal Elastic Quadruped
Davide Calzolari; Cosimo Della Santina; Alessandro M. Giordano; Annika Schmidt; Alin Albu-Schäffer
IEEE Robotics and Automation Letters Published:27 February 2023
DOI:https://doi.org/10.1109/LRA.2023.3249631
Abstract
Animals rely on the elasticity of their tendons and muscles to execute robust and efficient locomotion patterns for a vast and continuous range of velocities. Replicating such capabilities in artificial systems is a long-lasting challenge in robotics. By taking advantage of a pitch dynamics decoupling spring potential, this work aims to provide design rules and a control strategy to generate dynamic, efficient locomotion patterns in quadrupeds moving in a sagittal plane. We rely on nonlinear modal theory, which provides the tools to characterize continuous families of efficient oscillations in nonlinear mechanical systems. We provide simulations of an elastic quadruped showing that the proposed solution can robustly excite efficient locomotion patterns under non-ideal conditions.

")
")