")
2023-04-03 アメリカ合衆国・カリフォルニア大学ロサンゼルス校(UCLA)
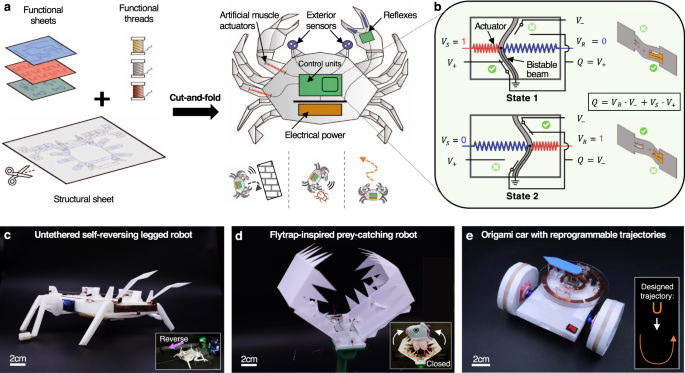
・ ULCA が率いる学祭的な研究チームが、コンピューターチップを使用せずに複雑で多様なタスクを実行できる、完全に折りたたみ可能なロボット、「OrigaMechs (Origami MechanoBots)」を開発。
・ ロボティクス分野では、折り紙に着想した薄くフレキシブルなシートによる製造が容易で軽量・コンパクトな自律型マシーンが開発されているが、センシングや環境への適応等のロボットの高度な機能を担うコンピューターチップが重量を増加させ、折りたたみを困難にする。そのため、半導体コンポーネントは、ロボットの最終的な形態で搭載する必要がある。
・ 本研究では、フレキシブルな導電性材料をプリカットした薄いポリマーフィルムシートに埋め込み、センサーとアクチュエーターと共に集積できるトランジスタを作製。シンプルなコンピューター論理機能をプログラムして半導体の機能を模倣させた同シートを切り取り、折りたたみ、組み立てると、環境に正確に反応してセンシング、分析や作動する自律型ロボットができる。
・ 同ロボットの演算能力は、シートの折り曲げによる多重化スイッチングと、プログラムされた AND、ORおよび NOT のようなブール理論演算子の組合せによるもの。スイッチングは、システムに入力される圧力や熱をベースとする電気信号を選択的に出力するメカニズムを可能にする。
・ 2 本のアンテナのどちらかが障害物を感知すると方向転換する虫型歩行ロボット、あごの部分で「獲物」を感知して閉じ込めるハエトリソウ型ロボット、また予め設定した幾何学的パターンの数種類の経路を移動できるプログラム可能な 2 輪ロボットの 3 種類のロボットを作製し、新システムを実証した。
・ 実証では電源にワイヤ接続したが、薄膜リチウム電池によるエネルギー貯蔵システムの埋め込みが長期的な目標。このようなチップフリー設計は、強力な放射線や磁界等の、従来の半導体ベースの電子機器の機能が停止する過酷な環境下で作業可能なロボットの開発につながるもの。
・ フレキシブルなカット・アンド・フォールド技術で作られたロボットは、平坦なパッケージングで輸送でき
るため、省スペースが重視される宇宙探査ミッション等で重要となる。また、画期的な教育用ツールや玩具・ゲームへの展開も可能。UCLA Technology Development Group を通じて新技術の特許を出願中。
・ 本研究は米国立科学財団(NSF)が支援した。
URL: https://samueli.ucla.edu/origami-inspired-robots-can-sense-analyze-and-act-in-challenging-environments/
<NEDO海外技術情報より>
関連情報
Nature Communications 掲載論文(フルテキスト)
Origami-based integration of robots that sense, decide, and respond
URL: https://www.nature.com/articles/s41467-023-37158-9
Abstract
Origami-inspired engineering has enabled intelligent materials and structures to process and react to environmental stimuli. However, it is challenging to achieve complete sense-decide-act loops in origami materials for autonomous interaction with environments, mainly due to the lack of information processing units that can interface with sensing and actuation. Here, we introduce an integrated origami-based process to create autonomous robots by embedding sensing, computing, and actuating in compliant, conductive materials. By combining flexible bistable mechanisms and conductive thermal artificial muscles, we realize origami multiplexed switches and configure them to generate digital logic gates, memory bits, and thus integrated autonomous origami robots. We demonstrate with a flytrap-inspired robot that captures ‘living prey’, an untethered crawler that avoids obstacles, and a wheeled vehicle that locomotes with reprogrammable trajectories. Our method provides routes to achieve autonomy for origami robots through tight functional integration in compliant, conductive materials.
")
")