2020-11-12 東京大学
カオス的遍歴は高次元非線形力学系特有の現象であり、いくつかの低次元な安定状態と、それらの間の不規則な遷移によって特徴づけられます。これまでカオス的遍歴と解釈できる時系列パターンは脳活動において見出されるのみならず、記憶やその想起等の動物の認知機能がカオス的遍歴を介して構成される可能性が指摘されてきました。それ故に、高度な認知システムの実現を目指す認知発達ロボティクスの文脈で、カオス的遍歴を介して認知ロボットを制御する試みがなされてきました。しかしながら、従来手法では安定状態や遷移パターンに応じてシステムの内部構造を設計者があらかじめ綿密に設計する必要がありました。
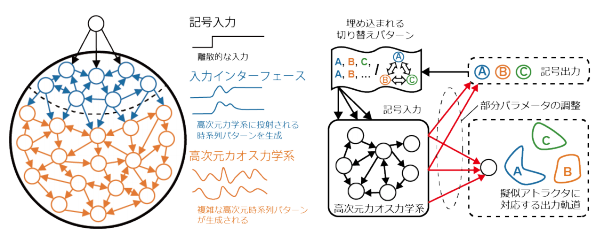
東京大学大学院情報理工学系研究科 國吉・新山研究室の井上 克馬大学院生および次世代知能科学研究センター(AI センター)の中嶋 浩平准教授らの研究グループは、カオス的遍歴の擬似アトラクタとその大域的な遷移則双方を高次元カオス力学系上に自在に設計する手法を提案しました。この設計手法はリザバーコンピューティングと呼ばれる機械学習の手法に立脚し、高次元カオス軌道が持つ複雑で多様な情報表現能力を積極的に活用することで、明示的なモジュールや階層構造をあらかじめ設定せずに部分的なパラメータの学習のみで達成されます。また、この特長により本提案手法は相互作用の調整が困難な物理系にも適用しやすく、物理系や材料の固有のダイナミクスを積極的に活用するニューロモーフィックデバイスの制御手法の確立に貢献することが期待されます。

の簡易判定法と被害軽減対策マニュアル(第2版)")