")
2023-05-15 ハーバード大学
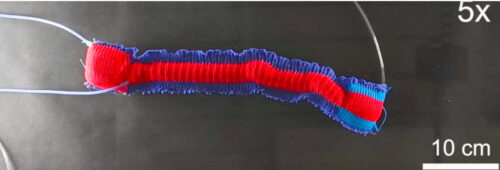
◆彼らはニット機械を改良し、ニットデザインのためのソフトウェアも開発しました。さまざまな編み構造の特性を評価し、曲がりや掴むなどの動作が可能なソフトロボットのプロトタイプを作成しました。これにより、ソフトロボットの製造において新たな手法が開拓され、産業化が可能になると期待されています。
<関連情報>
- https://seas.harvard.edu/news/2023/05/3d-knitted-robots
- https://onlinelibrary.wiley.com/doi/10.1002/adfm.202212541
空気圧ソフトロボティクスのための3Dニッティング 3D Knitting for Pneumatic Soft Robotics
Vanessa Sanchez, Kausalya Mahadevan, Gabrielle Ohlson, Moritz A. Graule, Michelle C. Yuen, Clark B. Teeple, James C. Weaver, James McCann, Katia Bertoldi, Robert J. Wood
Advanced Functional Materials Published: 23 April 2023
DOI:https://doi.org/10.1002/adfm.202212541
Abstract
Soft robots adapt passively to complex environments due to their inherent compliance, allowing them to interact safely with fragile or irregular objects and traverse uneven terrain. The vast tunability and ubiquity of textiles has enabled new soft robotic capabilities, especially in the field of wearable robots, but existing textile processing techniques (e.g., cut-and-sew, thermal bonding) are limited in terms of rapid, additive, accessible, and waste-free manufacturing. While 3D knitting has the potential to address these limitations, an incomplete understanding of the impact of structure and material on knit-scale mechanical properties and macro-scale device performance has precluded the widespread adoption of knitted robots. In this work, the roles of knit structure and yarn material properties on textile mechanics spanning three regimes–unfolding, geometric rearrangement, and yarn stretching–are elucidated and shown to be tailorable across unique knit architectures and yarn materials. Based on this understanding, 3D knit soft actuators for extension, contraction, and bending are constructed. Combining these actuation primitives enables the monolithic fabrication of entire soft grippers and robots in a single-step additive manufacturing procedure suitable for a variety of applications. This approach represents a first step in seamlessly “printing” conformal, low-cost, customizable textile-based soft robots on-demand.
")