
製造・物流業の自動化促進やロボットハンド導入のコスト低減に貢献
2019-12-05 新エネルギー・産業技術総合開発機構,ダブル技研株式会社,東京都立産業技術高等専門学校
NEDOは、「次世代人工知能・ロボット中核技術開発」を行っており、今般、ダブル技研(株)、都立産業技術高専と共同で、さまざまな形状の物をつかむ把持多様性を備え、動作に応じてハンドの姿勢を固定することのできる可変剛性機構付き3本指ロボットハンドを開発しました。
同ロボットハンドは、1つの駆動装置で各指が物の形状に倣い、把持対象物の複雑な形状に対応することができるほか、各指の姿勢を任意の位置で固定(ロック)する機構により、ハンドリング位置を決める精度の向上を実現しています。
これにより、従来は把持する物に応じてロボットハンドを交換して対応していた生産ラインや、多品種を扱う物流倉庫などにおけるピッキング作業の自動化、ロボットハンド導入のコストの低減への貢献が期待できます。
なお、ダブル技研(株)は、今回開発した機構を採用したロボットハンド「D-Hand Type R」の受注生産を本日より開始します。また、12月18日から21日まで東京ビッグサイトで開催される「2019国際ロボット展(iREX2019)」に出展します。

図1 「D-Hand Type R」
1.概要
国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)は、政府の「ロボット新戦略」(2014年度策定)を受け、現在の人工知能(AI)・ロボット関連技術の延長上にとどまらない、人間の能力を超えるような革新的な要素技術をターゲットとし、従来、AI・ロボットの導入を想定しなかった分野での需要創出を目指すプロジェクト※1を実施しています。近年、ロボットによる人の作業代替に対するニーズが高まっており、汎用的に利用できるロボットハンドの登場が待たれています。
その中でもロボットハンドによるピッキングは、ロボットの導入を推進している製造業や物流業界などにおいて、労働人口の減少に対して日本が生産性を維持・強化していくために必須の自動化システムになります。
現在、生産現場で使われているロボットハンドは2本の指で物を挟んで把持するグリッパー型が多く、把持対象が限定的であり、物の形状に応じてロボットハンドを交換する必要があります。また、複雑な形状の物の把持には、専用のロボットハンドを用意する必要があり、2指のグリッパー型のような単純な機構のロボットハンドでは把持できないものも把持することができる、産業用3本指ロボットハンドのニーズが高まっています。
このような背景のもと、NEDOとダブル技研株式会社、公立大学法人首都大学東京 東京都立産業技術高等専門学校は、2017年度に極めて単純な制御だけでさまざまな形状の物を安定的に優しく把持することができるロボットハンドの「からくり」※2と、それを応用した産業用の3本指のロボットハンド「New D-hand」を開発しました。従来の3本指ロボットハンドは、複数のセンサーを用いて物を把持するため、その制御が複雑となりますが、「New D-hand」は、「からくり」により複雑な形状の把持が可能であるためセンサーが不要であり、瞬時に把持できるというメリットがあります。一方で、「からくり」による制御は遊びがあるため外力に弱く、把持した物を固定することができないという課題がありました。
今般3者は、さまざまな形状の物を把持した後に任意の状態でその姿勢を固定(ロック)することができる可変剛性機構をロボットハンドに付加することに成功しました。これにより、多品種ピッキング作業や、人間の手首の動きのような柔軟性が必要とされる部品挿入作業の自動化が可能となります。
また、センサーレスで1つの駆動装置という極めて単純な制御を行うため、ロボットハンドの導入コスト低減を実現し、従来は人の手作業に頼っていた製造業や物流業界など幅広い分野への導入拡大が期待されます。
なお、ダブル技研(株)は、今回開発した機構を採用したロボットハンド「D-Hand Type R」の受注生産を本日より開始します。また、12月18日から21日まで東京ビッグサイトで開催される「2019国際ロボット展(iREX2019)※3」に出展します。
2.今回の成果
物を把持する際に、1つの駆動装置のみで複数の指の関節を駆動させる「からくり」は、各指が屈曲した時に把持するものの形状に倣います。一方で、「からくり」による制御は遊びがあるため外力に弱く、把持したものを固定することができないという課題がありました。
従来の倣った状態で把持するだけでは遊びを持った状態ですが、倣った状態で各指を固定させることで、外力による影響を受けにくくし、その姿勢を保持する事ができます。具体的には、把持する時に倣って動いていた3Dフレキシブルユニットを把持後に固定することで、対象物の姿勢を任意の位置にすることが可能となります(図2)。
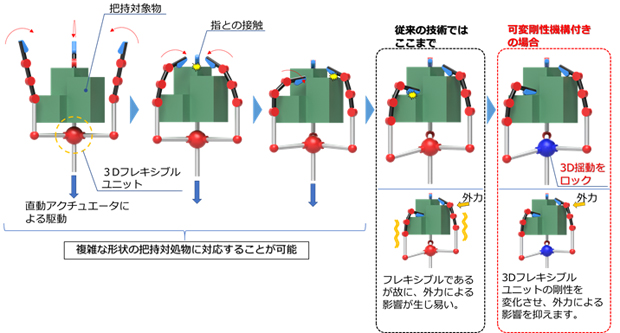
図2 把持機能 特徴概略図
これらの機構により、多様な物を多様な姿勢で把持できることから、製造、物流業界などにおける単純な搬送用途のみならず、ロボットハンドの剛性を変化させることで成し得る加工工程や組立工程の作業を可能とします。例えば加工機のチャックにて粗材をセットするような作業工程において、人が手で作業する際は、時には指や手首の関節を柔らかく動かして把持したものが挿入部に倣うように力を抜いたり、時には逆に関節がしっかりと固定されるように力を入れて押し込むようなことが行われます。開発したロボットハンドはこのように人間の前腕、手首が持つ動作に応じてハンドの姿勢を固定できる可変剛性機能を取り入れることで、人間の柔軟性を利用した手作業の代替や多品種ピッキング作業の自動化が可能となりました。
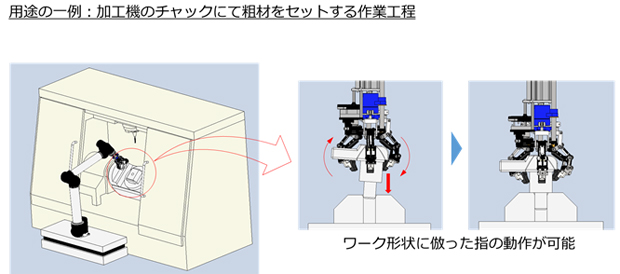
図3 用途例とその効果
| 標準仕様 | |||
|---|---|---|---|
| 把持力 | [N] | 60 | |
| 把持開口幅 | [mm] | 180 | |
| 可搬質量 | 包含把持 | [kg] | 10 |
| 指先把持 | [kg] | 5 | |
| 開閉速度 | [mm/s] | 450 | |
| 反復精度 | [mm] | 0.1 | |
| ハンド部質量 | [kg] | 1.5 | |
(把持力、可搬質量は採用の市販アクチュエータ推力に依存。
反復精度は3Dフレキシブルユニットの保持力最大時における値。)
図4 「D-Hand Type R」標準仕様

図5 「D-Hand Type R」標準タイプ概寸
【注釈】
- ※1 プロジェクト
- 事業名:次世代人工知能・ロボット中核技術開発/革新的ロボット要素技術分野
前腕を含むロボットハンド/人の手に近い高性能で堅牢性を併せ持つロボットハンドの開発
実施期間:2016年度~2019年度 - ※2 からくり
- 人間の手や指の微妙な構造を分析し、工学的に模倣した独自の構造。人間のように、指や関節一つ一つの位置や動作を細かく制御せず1個のモーターのみで手や指を連動させて対象物に自然になじませることが可能。これによって、最小限の力で、安定的にかつ優しく物をつかむことを実現。
関連ニュースリリース
単純制御でさまざまな物をつかむロボットハンドの「からくり」を開発(2018年1月11日) - ※3 2019国際ロボット展
- 会場:東京ビッグサイト 青海・西・南ホール
開催期間:2019年12月18日(水)~21日(土)
ウェブサイト: 2019国際ロボット展
3.問い合わせ先
(本ニュースリリースの内容についての問い合わせ先)
NEDO ロボット・AI部 担当:前原、渡邊
ダブル技研(株) R&D事業部 担当:山田
(その他NEDO事業についての一般的な問い合わせ先)
NEDO 広報部 担当:中里、坂本、佐藤


