2023-06-02 国立天文台 RISE月惑星探査プロジェクト
探査機「はやぶさ2」に搭載されたレーザ高度計LIDARをレーザ中継器として使って約600万kmの距離を測定したという論文が国際誌に出版されました[1]。
地上→探査機方向(往路)の光に同期して探査機→地上方向(復路)のレーザ光が射出される方式(エコー・トランスポンダー方式)では初めての長距離測定成功例です(図1)。
当時の実験の様子や方法などはウェブ記事[2]に詳しく書かれていますので、合わせてご覧ください。この記事ではQ&A方式で論文のポイントを紹介します。

図1 実験の概要。地上からレーザパルスを送信し、はやぶさ2LIDARを中継器として利用して光による距離測定実験を行いました。フランス局で復路の光が検出されて測距に成功しました。
1,なぜ光で測るの?
探査機の位置と速度を地球上から測るのに普通は電波を使います。マイクロ波と呼ばれる電波は地球の雲を突き抜けてくれるので、いつでも探査機と通信ができるためです。が、電波に加えてコーナーキューブなど光の入射方向と出射方向が同じになるもの(逆反射板)を探査機に載せて、光を使って距離を測ることもあります([3])。逆反射板を使った光による距離測定では、電波中継器と違って時間遅れが発生しないこと、波長が電波より短いこと、地球大気の影響を容易に補正できることなどから、高精度(cm程度)の距離測定ができます。地球周回衛星の軌道変化から地球の重力場の時間変化を調べたり、1970年代のアポロ計画とルナ計画で月面に設置された逆反射板までの距離変化から月の潮汐変形や回転変動を研究したりします。
ただし逆反射板の場合は距離が遠ければ遠いほど戻ってくる光が弱くなるため、地球の月までが観測の限界とされています。光中継器を使うと、装置内部で発生する時間遅れが誤差要因の一つとなりますが、到達距離を延ばすことができます。
2,論文の内容は?
今後使えるかもしれない技術を今飛行中の探査機に積まれている装置で試してみた、という実証実験(デモンストレーション)の論文です。2015年の同じ実験では地上→探査機(往路)の光をLIDARで検出して天体到着前の機器性能の確認ができましたが、復路の光を地上装置で見つけることはできませんでした。今回扱った2020年の実験では参加した日・豪・仏の3局すべてで往路方向の光を確認でき、フランス局では復路の光を検出して測距に成功しました。電波で得られた距離との差が往復で約10mだったことや、実験で分かった光中継器方式での改善点などを書きました。
「はやぶさ2」のLIDARは光中継器ではなく、小惑星リュウグウの近くに滞在した探査機から距離を測ることが使命ですので光中継器モードは言ってみれば実験用の「おまけ」で、この目的のために設計されているわけではありません。それでも電波と同程度に遠距離の距離(しかもこの方式での最長記録)が測れ、将来に向けて課題が抽出できた、というのが売りです。
3,その問題点や改善点とは?
一つ目の問題点は中継器内部での時間遅れが時間的に大きく変化してしまうことです。LIDARのレーザは受動Qスイッチ方式といい、レーザ媒体に十分なエネルギーの光がたまった時点で光が射出されます。たまるエネルギーが周辺温度に依存するので、時間遅れが保温用ヒーターと同じ時間変動を繰り返してしまいます。問題はそれが実時間で予測できないことと、変動量(4マイクロ秒)が地上局で設定できる範囲(フランス局の場合1.6マイクロ秒)よりも大きいために有効データを取れる時間が全体の1/5くらいしかなかったことです。二つ目は測定頻度(繰り返し周期)が低かったことです。この装置では2秒間に一回しか測定ができませんでした。従って将来に向けた改善点はi)内部の時間遅れの変動を抑えて値が分かるようにすることと、ii)測定頻度を上げることが挙げられます。
4,データ処理で工夫した点は?
地上局で記録されたデータのうち、ノイズを劇的に減らしたことです。地上からは2秒間に20発のレーザを照射していたのですが、LIDARで受光できるのは上に述べた通り2秒間に1回なので、それ以外は全部ノイズということになります([4])。LIDARの受光データをうまく使うと地上からの2秒間20発のうちのどれが受光できたパルスだったのかが分かったので([5])、それ以外をノイズとして除去することができました。図2に具体例を示します。横軸は時刻、縦軸はレーザパルスの往復時間から予測往復時間とLIDARでの時間遅れを引いたものです。横に一列になっている点群がLIDARから照射されたレーザパルスです。ノイズ除去前の上の図でも辛うじて分かりますが、ノイズを除いた下図ではよりはっきりと横一列になっているのが分かると思います。
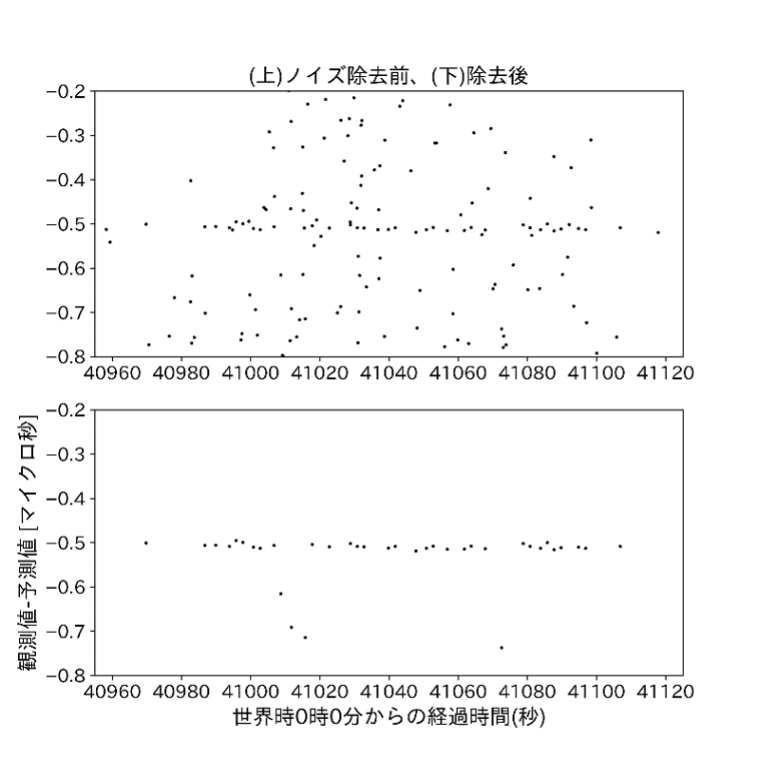
図2:フランス局で得られた一部(170秒間)のデータ(上)、LIDARが受光した時間と判定できたものだけを抽出したもの(下)。縦軸はレーザパルスの往復時間から予測時間とLIDARでの時間遅れを引いたもの。下の図で直線に乗っているものが信号、ずれている4点はノイズ。論文[1]の一部のデータを用いて筆者が再構成。
5,次の計画はありますか?
以下は論文には書いていない事です。はやぶさ2拡張ミッションでは次の天体に到着する2031年までに地球スイングバイが2回予定されており、まだ実験のチャンスはあります。また、実験は機器の動作確認や視野方向を決めるのに有効ですので、2023年4月14日に打ち上げられた、日本も参加している欧州の木星系探査機JUICEでは片道の光リンク実験が行われるかもしれません。
この論文はCOSPAR(国際宇宙空間研究委員会)のジャーナルであるAdvances in Space Researchの2023年5月号に掲載されました。
[1]Noda et al. (2023) Demonstration of deep-space synchronous two-way laser ranging with a laser transponder aboard Hayabusa2, Adv. Space Res. 71, 4196-4209.<https://doi.org/10.1016/j.asr.2022.12.057>
[2]https://www.hayabusa2.jaxa.jp/topics/20210317_LIDAR/
「レーザで600万kmの距離を測りました」 JAXAはやぶさ2ウェブサイト記事
[3]よく知られているGPS衛星にも実は逆反射板が搭載されています。また、日本のH-1ロケット試験機1号機には「あじさい」という逆反射板のみで作られた衛星が載せられたのも有名です。
[4]この時期は地球から見て探査機と太陽が近かったたため、地球上の昼間に実験せざるを得ませんでした。そのため太陽光によるノイズが常に存在しました。
[5]LIDARの光中継器モードでは1秒間に2発のパルスを受光し、パルスとパルスの間の時間を測れるようになっています。地上からのレーザパルス間隔がいつも同じだったならば判断できなかったのですが、うまい具合に適度にばらついていたためにどのパルスがLIDARで受光したのかを判定することができました。
(文責 野田寛大)

