
2024-01-15 株式会社NTTドコモ,慶應義塾大学
株式会社 NTT ドコモ(以下、ドコモ)と慶應義塾大学ハプティクス研究センター(以下、慶大)は、慶大が開発したロボット制御技術「リアルハプティクス®」※1 を活用し、力加減を適切に操作できる半自律型ロボットハンド・アームの無線自律制御に成功しました。このロボットは、物を掴んだときの力加減(力触覚情報※2)から、物の材質を判別し、物に適した行動を自律的に選択することができます。5G と MEC(Multi-access Edge Computing)を組み合わせた、力触覚情報のリアルタイム分析は日本初※3 の取り組みです。
現在の日本ではロボットの社会進出が急速に高まっていますが、行動に機転を利かせることや、細かな対応が難しいという課題があります。そのため、ロボット稼働時には人の支援が求められる場面が多々あり、人が遠隔で操作するロボットと、人の代わりに働ける自律型ロボットが組み合わさった半自律型ロボットが注目されています。リアルハプティクスは遠隔操作ロボットや自律型ロボットに人のように掴むものに応じたやさしい力加減を持たせることができ、ロボットのさらなる活用が期待できます。
このような背景を踏まえ、昨年度は、モバイルデータ通信環境におけるリアルハプティクスを搭載した遠隔操作ロボットの実現性を検証※4 しました。そして、今年度は、リアルハプティクスで計測できる力触覚情報に 5G と MEC を組み合わせた自律制御システムを開発しました。このシステムの材質判別には、カメラなどの視覚情報を使用せず、力触覚情報から判別しているため、表面と中身の弾力感が異なるような、視覚では判別が難しい物を適切な力加減で持ち上げ、選別することを可能にします。
このような半自律型ロボットを活用することで、様々なユースケースの創出や、ロボット市場の拡大が期待できます。特に、5G と MEC の利用により、コストを抑えてモビリティの高いロボットを各地で利用できます。無線遠隔操作では、新たな業種でのリモートワークを創出し、移動に制約のある方々の社会参加の一助としても貢献できます。また無線自律制御では、ロボット本体が高性能なコンピューティングリソースを持つ必要がないため、ロボットの軽量化に繋がり、身近なシーンにおけるロボットのさらなる活躍を促進します。

労働者の移動時間の効率化・人材不足の解消など

専門家の到着時間を短縮・専門技術をどこからどこへでも提供可能など
ドコモと慶大は今後、5G Evolution & 6G 時代におけるユースケース創出に向け、リアルハプティクスをはじめとするロボット制御技術と、さらなる低遅延通信技術を組み合わせ、無線で制御される半自律型ロボットを実現し、さまざまな分野におけるロボット活用の社会実装をめざします。
なお、ドコモの技術と「リアルハプティクス」を組み合わせる取り組みは、2024 年 1 月 17 日(水)からドコモが開催する「docomo Open Houseʼ24」にてご紹介します。
(https://docomo-openhouse24.smktg.jp/public/application/add/32)
※1 慶應義塾大学ハプティクス研究センターの大西公平特任教授が発明した現実の物体や周辺環境との接触情報を双方向で伝送し、ヒトの力加減をロボット上で再現する技術
※2 力加減や感触をあわせた情報。「位置」の情報と「力」の情報を組み合わせてできる
※3 2024 年 1 月 15 日時点、ドコモ調べ ※4 5G の高信頼低遅延通信 URLLC を活用し、ヒトの手を動かして感じ取れる手応えをロボット上で再現することに成功~日本初、慶大の独自技術「リアルハプティクス」をモバイルデータ通信で実現~(https://www.docomo.ne.jp/binary/pdf/info/news_release/topics_230125_10.pdf)
*「リアルハプティクス」はモーションリブ株式会社の登録商標です。
本件に関する報道機関からのお問い合わせ先
株式会社 NTT ドコモ 6G ネットワークイノベーション部ソリューション技術担当
【配信に関する問い合わせ】慶應義塾 広報室(担当︓豊田玲)
【研究内容に関する問い合わせ】慶應義塾大学ハプティクス研究センター担当
別紙
MEC を活用し、力加減を適切に操作できる半自律型ロボット/システム
1. 概要
慶大が開発したロボット制御技術「リアルハプティクス®」と 5G の特徴を最大限に引き出せる docomo MEC®を活用し、力加減を適切に操作できる半自律型ハンド・アームロボットを開発しました。半自律型ロボットとは、遠隔操作と自律制御を利用シーンに応じて切り替え可能なロボットのことを呼びます。

遠隔操作で食器の運搬動作をロボットに覚えさせている様子
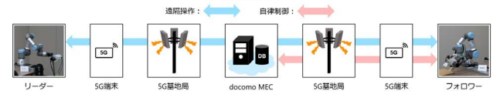
2. ネットワーク構成
本システムは、docomo MEC をリアルハプティクス搭載ロボット制御の中心として、遠隔操作や自律制御が可能なようにネットワークを構成しています。docomo MEC には、手元側装置のリーダーと遠方側装置のフォロワーを繋ぎ合わせる接続管理システムを実装しています。遠隔操作では、リーダーとフォロワー間で双方向に転送される制御情報を docomo MEC が仲介します。一方、自律制御の際は docomo MEC がフォロワーへ制御情報を送信します。これらの通信には、docomo MEC のオプションであるサービス「MEC ダイレクト®」が活用され、ロボットと MEC 基盤を直結するように通信経路が最適化されており、低遅延・高セキュリティ通信を実現しています。
3. 自律制御システムの仕組み
新規に開発した自律制御システムは、ロボットが掴んだ物の材質を MEC でリアルタイムに判別し、物に適した力加減や行動をとることができます。具体的には、飲食店での皿の配膳シーンを取り上げ、数種類の皿の材質や重みを判別し、皿を潰すことや落とすことなく、指定先までの配膳を自律的に完遂することができます。特に、材質判別には、カメラなどの視覚情報を使用せず、力触覚情報から判別しているため、表面と中身の弾力感が異なるような、視覚では判別が難しい物を適切な力加減で持ち上げることを可能にします。 ① 認知機能︓リアルハプティクス搭載ロボットで計測できる力触覚情報を MEC へ常時アップロードします。
② 認知機能︓MEC 側でロボットが皿を掴んだことを確認できたら、皿の材質や重さを推定します。
③ 判断機能︓認知した情報にもとづいて、次のアクションを判断します。
④ 制御機能︓判断結果に対応した制御情報をフォロワーロボットへ送信します。
自律制御システムの流れ
*「docomo MEC」「MEC ダイレクト」は株式会社 NTT ドコモの登録商標です。


")