
2020-12-23 農研機構,立命館大学,株式会社デンソー
ポイント
果樹生産の大幅な省力化を目指し、人とほぼ同じ速度でリンゴやナシなどの果実を収穫するロボットのプロトタイプを開発しました。このロボットが果実を収穫する様子を動画で紹介します。今後、果樹生産地への導入が可能となるよう、実用化に向けた実証研究を継続する計画です。
概要

ニホンナシV字ジョイント樹を収穫中の収穫ロボットプロトタイプ
農研機構、立命館大学、株式会社デンソーでは、果樹生産の担い手の減少と高齢化に対応するため、作業の大幅な省力化に向けた作業用機械の自動化・ロボット化と機械化に適した樹形の開発を推進しています。 具体的には、カンキツ、リンゴなど果樹9品目において、作業の自動化・機械化が容易な V字樹形1)などの 列状密植樹形2)を開発するとともに、V字樹形に合わせて様々な作業に利用できる自動走行車両や収穫ロボットの開発を進めてきました。
この度、3法人は共同で、V字樹形のリンゴ、ニホンナシ、セイヨウナシを対象とした果実収穫ロボットのプロトタイプを開発しました。
このプロトタイプは、自動走行車両にけん引されながら、2本のアームにより果実の収穫を行います。収穫した果実は自動走行車両の荷台に設置した果実収納コンテナシステムに送られます。果実収納コンテナシステムでは、コンテナが果実で一杯になると、空のコンテナと自動で交換しながら自動収穫を継続します。人による収穫(11秒/個)とほぼ同じ速度で収穫が可能です。
収穫ロボット開発では、立命館大学が果実認識、収穫時期判定などのソフト開発を、株式会社デンソーが収穫ロボットのハード開発を担当しました。
開発したロボットが果実を収穫する様子を動画でご覧いただけます。
動画のリンク https://youtu.be/xdnUuIIdKDY
関連情報
予算:農研機構生研支援センター「革新的技術開発・緊急展開事業(うち人工知能未来農業創造プロジェクト)」
(http://www.naro.affrc.go.jp/brain/h27kakushin/files/aipro_subject2_03.pdf)
特許:特開2019-209389「ロボットハンド」
問い合わせ先
研究推進責任者 :農研機構果樹茶業研究部門 研究部門長 高梨 祐明
研究代表者 :農研機構果樹茶業研究部門 領域長 草塲 新之助
広報担当者 :同 果樹茶業研究部門 果樹連携調整役 大崎 秀樹
ソフトウェア開発
研究担当者 :立命館大学 総合科学技術研究機構 客員教授 深尾 隆則
ハードウェア開発
研究担当者 :株式会社デンソー FA事業部 FA開発室 課長 西野 秀幸
詳細情報
社会的背景と経緯
現在、日本の果樹生産者の年齢構成は60歳代が最多となっており、今後さらなる高齢化が危惧されています。このような状況を打破するため、少ない人手で産地を維持できる画期的な省力生産技術、また、若い生産者の関心を引く魅力ある果樹生産技術の開発が強く求められています。そのためには、作業の機械化が必須となりますが、果樹は樹形が立体的(3次元)で複雑なため、受粉、摘果、収穫、整枝・せん定など多くの作業が手作業に頼らざるを得ないことから、機械化が非常に遅れているのが現状です。
しかし、近年は自動車の自動走行や各種ロボット、AI技術の開発と低価格化など関連技術の進歩が著しく、果実収穫といった複雑な作業においてもこれらの革新的技術を取り込んだ機械開発の可能性が見えてきました。
そこで、農研機構が代表を務める「革新的技術開発・緊急展開事業(人工知能未来農業創造プロジェクト:AIプロ)」では、機械化を推進するために、(1)樹種共通で、樹形を可能な限り平面(2次元)に近づけるV字樹形などの列状密植樹形の開発(果樹側からの機械化への歩み寄り)、(2)本樹形を前提に様々な作業に利用できる自動走行車両、自動薬剤散布システム、自動草刈りシステム、さらにリンゴ、ニホンナシ、セイヨウナシの収穫ロボットの開発を両輪として研究を進めてきました(図1)。
既に、自動走行車両、自動薬剤散布システム、自動草刈りシステムを開発してきましたが、この度、V字樹形のリンゴ、ニホンナシ、セイヨウナシを対象とした果実収穫ロボットのプロトタイプを開発しました。
研究の内容・意義
1.今回開発した収穫ロボットのプロトタイプは、自動走行車両にけん引されながら、2本のアームにより果実の収穫を行います(図2)。ニホンナシでは成熟期に達した果実のみを判定した上で収穫します。収穫した果実は自動走行車両の荷台に設置した自動収納システムに送られます。自動収納システムでは、コンテナに果実が一杯になると、空コンテナと自動で交換しながら自動収穫を継続します。人による収穫(11秒/個)とほぼ同じ速度で収穫が可能です。
このような果実の収穫作業を自動化するには、その開発要素として大まかに2つの要素があります。1つは収穫機構を含むハードの開発であり、もう一つは果実を認識する機能の開発でした。
2.収穫ロボットのハード開発では、まず、果実を傷つけずに収穫する機構が必要になります。果実の着果形態は樹種によって異なり、リンゴ、ナシ、セイヨウナシなどは手で容易に収穫できますが、カンキツ、カキ、ブドウなどは収穫にハサミが必要です。このため機械収穫が容易であると想定されたリンゴ、ナシ、セイヨウナシを対象とした収穫ロボットを開発しました。果実を把持するためのハンドは3つの爪で構成され、果実を傷つけない程度の把持力で果実を掴みながら、ハンドの回転により収穫する機構を開発しました。収穫した果実は、自動走行車両の荷台に設置された果実収納コンテナシステムに送られ、コンテナが一杯になると空コンテナと自動で交換されるシステムとしました。
3.収穫用ハンドにより果実を収穫するためには、1)果実の認識、2)その果実が収穫可能かどうか判断、3)果実の着果位置の把握、を経てハンドを果実の位置まで駆動させる必要があります。果実の認識および熟度判定については、可視画像撮影と距離計測が可能な RGB-Dカメラ3)による可視画像を用いた人工知能手法(ディープラーニング4))により行いました。その結果、果実認識およびニホンナシの熟度判断について日中、夜間に関わらず90%以上の精度が得られました(図3)。また、果実の着果位置の把握についてはRGB-Dカメラにより距離計測を行っています。さらに収穫ロボットの開発目標である収穫スピードを人と同程度(11秒/個)以上とするため、収穫アームを2本とし、2アームのマニピュレータ・ハンドシステムが互いの軌道を理解し、アーム同士が接触しないように軌道計画を行うアルゴリズムを構築しました。このことにより、人とほぼ同程度のスピードでの果実収穫が可能となりました。さらに、収穫ロボットは自動走行車両にけん引されながら果実収穫を実施するため、収穫が終了した場所から次に収穫する果実が着果している場所まで移動する必要があります。この移動については、自動収穫ロボットに取り付けたカメラ画像・距離画像から次に収穫する枝の果実を認識し、車両の移動量を指示することにより車両が自動移動し、樹冠下の最適な位置から自動収穫を行うシステムを開発しました。
今後の予定・期待
開発した収穫ロボットはプロトタイプであり、市販化に向けては現地実証試験などを繰り返すことで安定性や正確性をさらに向上させるとともに、ロボットを安全に利用できる仕組み作りも必要です。さらに、収穫物の自動積み下ろし機能など、周辺技術の開発が進めば、より一層、便利になると考えられます。
機械導入のためには、V字樹形などの列状密植樹形の普及が極めて重要となります。果樹生産現場では、現時点では慣行的な、立体的な樹形や平棚栽培が一般的です。今回プロジェクトで取り組んでいるV字樹形などでは、機械利用が容易になると同時に、人が作業する場合でも省力、軽労効果があり、栽培技術の習得も容易になることが明らかになっています。これらの機械化に適した樹形(省力樹形)の導入を産地が積極的に推進できるよう、農林水産省が実施する補助事業(果樹農業生産力増強総合対策など)による改植・新植の取り組みへの支援が行われております。機械化が容易な樹形の普及とともに果実収穫ロボットや、自動走行車両を利用した無人作業機械などが果樹生産現場に導入されることで、次世代の後継者である若者に魅力のある果樹生産技術を提示できるとともに、新規参入者や女性の参入を促すことで新たな果樹産地の発展にもつながることが期待されます。
用語の解説
- 1)V字樹形
- 図1の上部に示したような樹の形が「V」の文字に見える樹形の総称。
- 2)列状密植樹形
- 図1の上部に示したような植栽が列状で樹間隔が密植となる樹形の総称。1)のV字樹形も含まれます。
- 3)RGB-Dカメラ
- 映像の奥行きが測定できるカメラ。カメラから対象物までの距離が測定できます。
- 4)ディープラーニング
- 深層学習とも呼ばれます。多量のデータを用いて学習することにより、自動的に特徴を抽出し、その特徴を利用して識別方法や課題解決方法を提示するシステム。近年、その性能が人間を超える場合もあり、実応用が急速に進んでいます。
発表論文
Yuki Onishi, et al., 2019. An automated fruit harvesting robot by using deep learning. ROBOMECH Journal. 6(13), 1-8.
参考図

図1 プロジェクトの概要
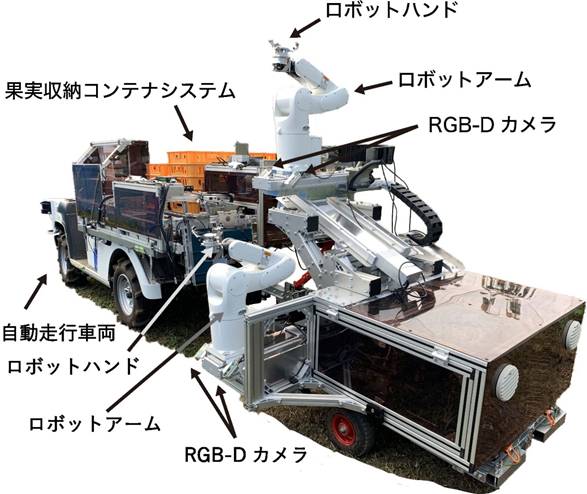
図2 開発した果実収穫ロボット

図3 ディープラーニングによる果実認識(ニホンナシV字ジョイント樹形)
□は認識に成功した果実。青と赤の◎は、ていあ部(果頂部、果実の尻の窪んだ部分)の果皮色から収穫適期を判断するためのていあ部の認識。Cam1~Cam4の画像は、収穫ロボットに取り付けられた4台のカメラが同時に撮影したそれぞれの画像。1つの画像中の果実の番号は、1つのカメラが認識した果実の通し番号。
プレスリリース
(研究成果) 果実収穫ロボットのプロトタイプを開発 2020年12月23日 (水曜日)
農研機構、立命館大学、株式会社デンソー
<https://www.naro.go.jp/publicity_report/press/laboratory/nifts/137793.html>


