(New glove-like device mimics sense of touch)
2020/9/9 オーストラリア連邦・ニューサウスウェールズ大学(UNSW)
・ UNSW が、ハプティック(触覚)技術を活用した、布地に組み込める軽量・薄型の 3 軸ソフトスキン・ストレッチ(SSD)デバイスを開発。
・ ハプティック技術は、力、振動や動きにより皮膚の一部分を刺激することで、現実に近い触感経験を再現するもの。人間の手には触覚レセプターが高密度で存在し、日常生活における様々なオブジェクトの認識・把持に利用される。
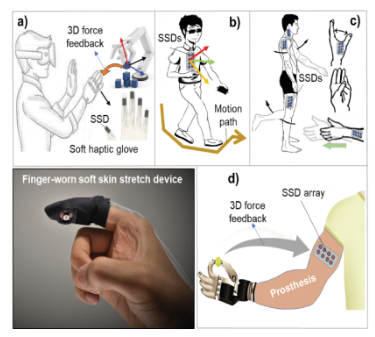
・ ウェアラブルハプティックグローブの指サックに内蔵した同 SSD デバイスは、ソフト、ストレッチャブルで触感を再現する第二の皮膚のように機能し、日常的な活動を強化するハプティックコミュニケーションの新形態として期待できる。
・ また、スケーラブルで、テレヘルス、医療用デバイス、手術支援ロボット、AR・VR、遠隔操作や製造等のあらゆるアプリケーション用の布地に取り込むことが可能。視覚・聴覚的なフィードバックが遅く、非直感的で認知負荷が増大しやすい遠隔手術や自動運転車等の新興システムに共通した課題の解決を目指す。
・ 既存のハプティック技術では、バーチャルな環境や遠隔設置されたオブジェクトの触感の再現が困難。振動を利用するものが多く、ボタンをクリックする触感をシミュレートするタプティックエンジンのように様々な電子デバイスに内蔵されている。
・ 新技術では、ソフトで小型な人工の「筋肉」による効果的な皮膚感覚の再現方法により、既存のハプティックデバイスの問題点を解決。この人工筋肉がソフトな触覚器を介してユーザーの指先に十分な垂直抗力とせん断応力を発生させ、より現実的で没入感のある触感を再現する。
・ 例えば、オーストラリアで同 SSD デバイスのハプティックグローブを、米国で 3D 力センサーをそれぞれ装着した場合、米国側がオブジェクトを把持すると力センサーがその把持力を計測してオーストラリアにその信号を送信することで同一の触感を共有できる。
・ 同新技術は特許申請済み。18 ヶ月~3 年以内での商用化を見込む。今後は同デバイスの効果に関するユーザー評価の実施を予定。また、ハプティックモーションガイダンス、高齢者や視覚障害者の歩行支援、触知的なテキスト言語や手術用ロボットの 3D フォースフィードバックディスプレー、人工義肢や VR・AR 等の多様なハプティックアプリケーションで同デバイスの利用を検証する。
URL: https://newsroom.unsw.edu.au/news/science-tech/new-glove-device-mimics-sense-touch
<NEDO海外技術情報より>
(関連情報)
IEEE Access 掲載論文(アブストラクトのみ:全文は有料)
Soft Microtubule Muscle-Driven 3-Axis Skin-Stretch Haptic Devices
URL: https://ieeexplore.ieee.org/document/9178739
Abstract
In the real world, people heavily rely on haptic or touch to manipulate objects. In emerging systems such as assistive devices, remote surgery, self-driving cars and the guidance of human movements, visual or auditory feedback can be slow, unintuitive and increase the cognitive load. Skin stretch devices (SSDs) that apply tangential force to the skin via a tactor can encode a far richer haptic space, not being limited to force, motion, direction, stiffness, indentation and surface geometry. This paper introduces novel hand-worn hydraulic SSDs that can induce 3-axis tangential forces to the skin via a tactor. The developed SSDs are controlled by new soft microtubule muscles (SMMs) which are driven by hydraulic pressure via custom miniature syringes and DC micromotors. An analytical model is developed to characterize the responses of SMM output in terms of force and elongation. A kinematic model for the motion of the 3-axis SSD is also developed. We evaluate the capability of the tactor head to track circular reference trajectories within different working spaces using an optical tracking system. Experimental results show that the developed SSDs have good durability, high-speed, and can generate omnidirectional shear forces and desired displacement up to 1.8 N and 4.5 mm, respectively. The developed SMMs and SSDs created in this paper will enable new forms of haptic communication to augment human performance during daily activities such as tactile textual language, motion guidance and navigational assistance, remote surgical systems, rehabilitation, education, training, entertainment, or virtual and augmented reality.




