

2025-09-11 新エネルギー・産業技術総合開発機構,株式会社国際電気通信基礎技術研究所,京都大学
NEDOの委託事業において、ATR・京都大学・産総研は、AI搭載ヒューマノイドロボットに「サイボーグAI」を実装し、人の運動をみまね学習させることで人並みの実時間運動性能を達成した。ロボットはスケートボード運動における脳波・身体座標などの生体信号を基に学習し、上下だけでなく前後・左右の制御や体軸回復まで含めた全身制御を実現。これによりスラローム走行やトリックを転倒せずに行えるようになった。人とロボットの体格差を考慮し、サイバー空間で補正を行うことで適切な動作を獲得し、現実でも素早い運動が可能になった。本成果は介護・リハビリ、運搬など人との協働作業への応用が期待され、将来の共生社会実現に向けた基盤技術となる。
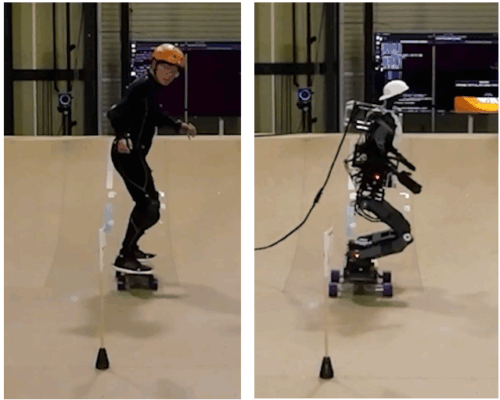
図:スラローム運動中の人の動き(左)とスラローム運動中のヒューマノイドロボットの動き(右)
<関連情報>


