
")
2023-03-07 カーネギーメロン大学
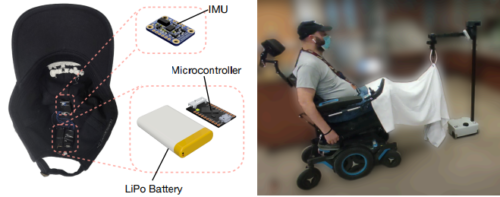
HAT(Head-Worn Assistive Teleoperation)は、頭の動きや音声認識でロボットを制御することができ、既存の手動ジョイスティックやWebインターフェースよりも、精密な運動能力を必要とせず、利用者の負担を軽減することができます。
<関連情報>
- https://www.cs.cmu.edu/news/2023/research-highlight-hat
- https://sites.google.com/view/hat-teleop/home
- https://arxiv.org/pdf/2209.13097.pdf
HAT: 頭部を装着した移動式マニピュレータの遠隔操作支援 HAT: Head-Worn Assistive Teleoperation of Mobile Manipulators
Akhil Padmanabha, Qin Wang, Daphne Han, Jashkumar Diyora, Kriti Kacker, Hamza Khalid, Liang-Jung Chen, Carmel Majidi, Zackory Erickson
Abstract
Mobile manipulators in the home can provide increased autonomy to individuals with severe motor impairments, who often cannot complete activities of daily living (ADLs) without the help of a caregiver. Teleoperation of an assistive mobile manipulator could enable an individual with motor impairments to independently perform self-care and household tasks, yet limited motor function can impede one’s ability to interface with a robot. In this work, we present a unique inertial-based wearable assistive interface, embedded in a familiar head-worn garment, for individuals with severe motor impairments to teleoperate and perform physical tasks with a mobile manipulator. We evaluate this wearable interface with both able-bodied (N = 16) and individuals with motor impairments (N = 2) for performing ADLs and everyday household tasks. Our results show that the wearable interface enabled participants to complete physical tasks with low error rates, high perceived ease of use, and low workload measures. Overall, this inertial-based wearable serves as a new assistive interface option for control of mobile manipulators in the home.

")
")