2020-12-08 理化学研究所,株式会社リバネス
理化学研究所(理研)生命機能科学研究センター集積バイオデバイス研究チームの田中陽チームリーダー、船野俊一研究員、田中信行上級研究員らの共同研究グループは、底棲生物[1]であるシビレエイ[2]の自律的な動きを利用し、海底地形図の作成が可能であることを実証しました。
本研究成果は、海底の地形情報を幅広く社会に還元し、さまざまな分野で役立てることに貢献すると期待できます。
今回、共同研究グループは、従来の計測機械を用いた海底探査とは全く異なる、底棲性で電源としても使えるシビレエイを生物エージェント[3]として用いた方法を提唱し、その手法の妥当性を検証しました。まず、大型水槽でシビレエイの撮影動画から動きをプロットし、シビレエイがほとんどの時間、底付近を動いていることを確認しました。次に、シビレエイに小型音響送信機のピンガー[4]を装着して海底に放ち、その位置を追跡することにより、海底の地形情報が得られることを実証しました。これは、底棲生物を用いた海底地形マッピングの可能性を示した初めての例です。
本研究は、科学雑誌『SN Applied Sciences』に近日掲載予定です。

シビレエイを利用した海底探査法(左)と海底での実証データ(右)
背景
私たちは海の恩恵を受けて生活しています。それは、魚類などの食糧利用をはじめ、海底油田など鉱物資源の利用、さらには海洋を海上交通や輸送のインフラとして利用するなど多岐に渡っています。海洋の利用を促進していくには、海中の情報をより高い精度でより早く把握する必要があり、その第一歩として全世界における高分解能の海底地形図の作成が重要です。
海底地形のマッピングには、音響ビーム[6]や光学探査[7]あるいは自律型海中ロボット[8]など、物理的な装置機械類を用いるものがほとんどです。むろん、これらは海底探査の主軸となる手法ですが、今回、共同研究グループは、これらとは全く異なるアプローチとして、海中生物を積極的に利用し、これを生物エージェントとして利用することを考案しました。ごく大雑把にいえば、「海のことは海の生き物に聞け」ということで、ロボットや遠隔操作機の代わりに、生物に最新のデバイス技術で小型化した探査装置や通信装置を装備させ、海底を探査させるというものです。生物エージョントでは、正確な制御は難しいもののある程度自律的に動けるため、ロボットのように動力を必要とせず、材料としては安価であり、広域を探査するのに適していると考えられます。また、単なる物理情報のみならず、その動きから餌や天敵などの存在を示す生物情報も得られる可能性があります。
図1にコンセプトや原理について示します。海底を探査するには底棲生物が適しており、本研究ではシビレエイを用いました。シビレエイは、これまでにも田中陽チームリーダーらが発電機として使えることを実証しており注1)、十分な電力を発することも確認できています。今回、その生態把握から生物エージェントとしての使用可能性を検証することを目標とし、大型水槽を用いたシビレエイの行動特性調査、および実際の海底においてピンガー[4]という小型音響発振器(送信機)を用いた位置追跡実験を行いました。
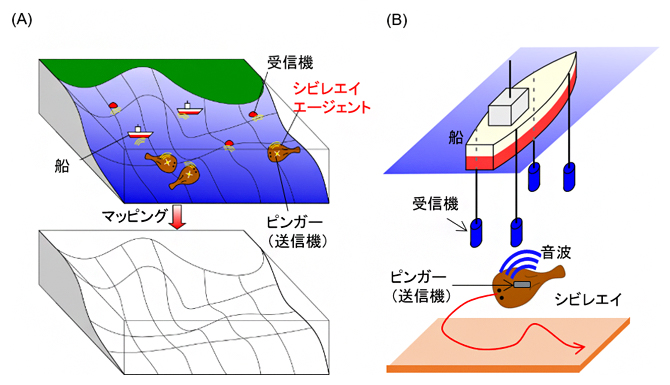
図1 本研究のコンセプト
(A)シビレエイを生物エージェントとして用いた海底地図作成のコンセプト。シビレエイに装着した小型の音響送信機ピンガーからの信号を船またはブイと呼ばれる海上の中継基地を通して受信し、その位置情報をリアルタイムに得て海底地形をマッピングする。
(B)シビレエイ位置情報測定の原理。ピンガーからの信号を位置の異なる複数の受信機で受信することで、その時間差から位置を計算する。
注1)2016年5月31日プレスリリース「シビレエイ発電機」
研究手法と成果
まず、地形が完全に分かっており、シビレエイの行動を確実に捉えられる環境として、大型の透明水槽を用いてシビレエイの行動特性調査を行いました。図2Aのように、水槽の正面、側面および上面にビデオカメラを設置して、シビレエイが水中でどのような行動をするのか観察しました。観察には、音響的な方法では壁の反射で測れないため、光学的な手法を採用しました。実験は、函館市国際水産・海洋総合研究センターの大型水槽(幅10m、奥行5m、高さ6m)で行い、高さ3mまで海水を入れ、水槽底には5m×5mの蛍光テープを原点で交わるように十字に貼り、座標を規定しました(図2B)。水槽底面中央を原点としています。シビレエイを中央付近に投入して、その動きを30分動画撮影し解析しました(図2C)。
解析結果を図2Dに示します。シビレエイの動きを解像度0.7cmで3次元的に捉えることができました。プロットの間隔が狭いところほど動きが遅いことを示していますが、速さを分かりやすくするため、各軸における位置の時間変化を図2Eに示します。観察した時間内で遊泳時間(動きが速いためグラフの傾きが急になっている部分)はわずか数分であり、残り時間は底面にとどまっていました(グラフの傾きが平らな部分)。このことから、シビレエイは多くの時間底面にいるため、シビレエイが止まっている時間のデータは海底の水深を示しているといえ、これをつなぐことで水深情報の取得、すなわち海底地形のマッピングが可能であることを確認しました。
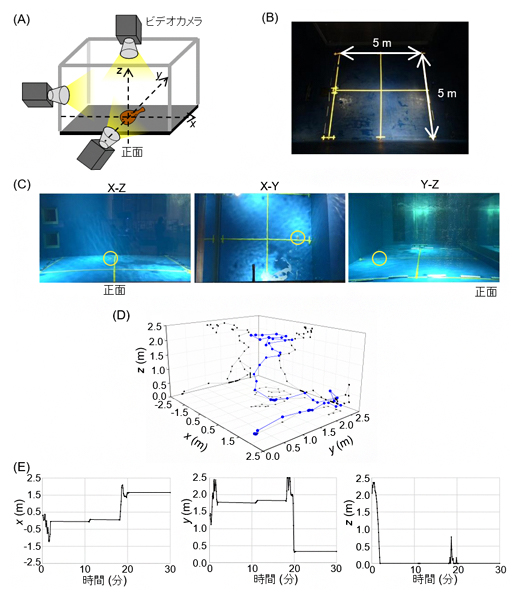
図2 大型水槽中でのシビレエイの挙動調査実験
(A)シビレエイ観察方法。透明水槽の正面、上面、側面からビデオカメラで撮影する。
(B)水槽底面の写真。座標特定のため、蛍光テープを5m×5mの範囲に貼っている。
(C)正面(X-Z)、上面(X-Y)、側面(Y-Z)からの各カメラによる水槽内の観察写真。〇で囲んでいるのがシビレエイ。
(D)水槽中でのシビレエイの軌跡の3次元プロット。青線が3次元座標、黒線が各投影面での平面座標を示す。30分間の動きを示し、プロットは5秒おき。
(E)(D)に対応した、シビレエイの各座標軸における位置の時間変化。高さ方向を示すZ軸を見ると、シビレエイは30分のうち多くの時間、底面にとどまっていることが分かった。
次に、海洋においてシビレエイの位置追跡実験を行いました。実験は、沖縄県の東海岸、南城市の馬天港沖で実施しました。受信機を搭載した船で図3Aの「測定エリア」付近に到達後、船を停止させて測定実験を行いました。ここは音響測深データから深さ20mで、ほぼ平坦な地形であることが分かっています。光学的には3次元的な位置計測が難しいので、音響信号発振器(送信機)であるピンガー(図3B)を用いました。このピンガーは非常に小型(36mm×9.5mm)で、魚の動きにほとんど影響を与えないことが分かっています。また、ピンガーには小型電池を内蔵させ、1秒ごとに信号を送出させます。水深はピンガー内蔵の圧力計で測定し、平面位置は図1Bに示したように、ピンガーからの信号を位置の異なる複数の受信機で受信することで、その時間差から位置を計算する原理で測定可能です。
ピンガーは、図3Cのように防犯タグにくくり付けて、シビレエイ背部に取り付けました。シビレエイが測定可能なエリア(およそ船の下の海底を中心として半径40m以内)から逃げないようにするため、シビレエイの頭部には釣り針で釣り糸を取り付け、船に固定した釣り竿につなぎました(図3D)。そして、おもりを付けて動かないようにしたコントロール用のピンガーと、それぞれピンガーを装着したシビレエイ2匹(#1と#2)を海中に同時刻に投入しました(図3E)。座標は、船の中心を原点として、左右をx軸、前後をy軸、上下をz軸としています。
その結果、コントロールピンガーとシビレエイ#1、#2のそれぞれの軌跡を取得できました。これを1秒ごとにプロットしたものを図3Fに示しますが、#1、#2では投入直後や引き上げ中などの軌跡は除いており、その条件でも一定の範囲への軌跡の広がりが見られ、一方でコントロールはほとんど動きが見られないことから、#1、#2が海底付近で動いている様子を追えていることが分かります。
コントロールと#1、#2の各軸における位置の時間変化を図3G~Iに示します。#1と#2は、概ね海底付近で止まっている、もしくは這っていることが分かります。なお、#1と#2のx軸、y軸のノイズのような周期的な速い振動は、コントロールにも見られることから、船の振動によるものと考えられます。ただし、#1の60分付近や#2の40分付近に見られるように、明らかに船の振動や這っているようなゆっくりした動きとは異なる動きとして、シビレエイは時折急速に動き、場所を変えていることが分かり、水槽実験での観察結果と同様の結果が得られました。このことから、シビレエイは水深情報の取得ひいては海底探査に適することが示されました。
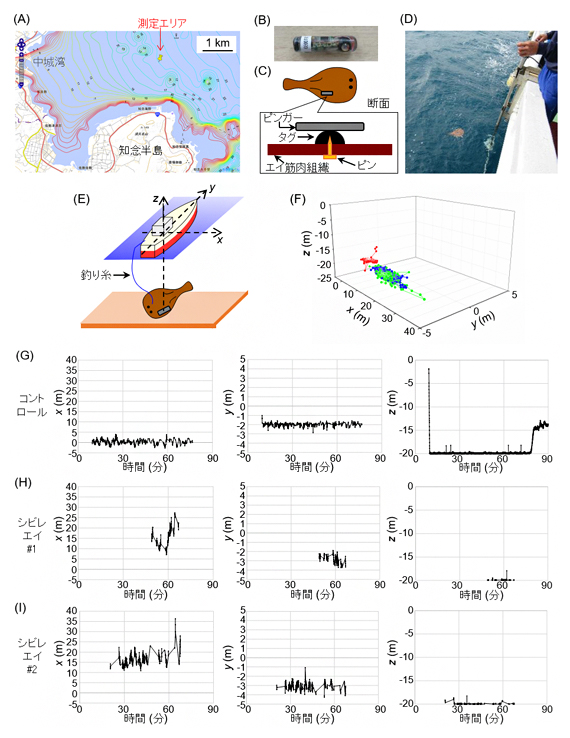
図3 シビレエイを用いた海底探査実験と結果
(A)測定したエリア付近の海底地形図(音響ビームで1m解像度で計測したもの)。地形図の等高線間隔は1m。場所は沖縄県の東海岸、南城市の馬天港沖。
(B)使用した小型ピンガーの写真。ピンガーの大きさは36mm×9.5mm。
(C)シビレエイへのピンガー装着方法。ピンガーにタグをくくり付け、シビレエイの背部にピンで装着する。
(D)船上からシビレエイを投入する様子の写真。
(E)シビレエイと船の位置関係および座標軸。
(F)シビレエイ2匹とおもりを付けて船下の海底に下したコントロールピンガーの90分の軌跡。赤:コントロールピンガー、青:シビレエイ#1の軌跡、緑:シビレエイ#2の軌跡。ただし、海底に着底するまでや途中船に引き戻した時間の動きは除外している。
(G)(F)に対応した、コントロールピンガーの各座標軸における位置の時間変化。投入時から引き揚げ時までの全時間帯のデータ。
(H)シビレエイ#1の(G)と同様のデータ。ただし、投入直後や引き上げ中などのデータは除く。
(I)シビレエイ#2の(G)と同様のデータ。ただし、投入直後や引き上げ中などのデータは除く。
今後の期待
本研究では、海底探査に生物を用いるという斬新な発想の下、大型水槽ならびに実際の海洋において、シビレエイを用いて探査実験を行い、その可能性を検証できました。
今回はまだ、シビレエイの電源によってピンガーを駆動するには至っていません。したがって、今後は、激しいシビレエイの動きにも耐えうるデバイス、十分な電力を蓄えるキャパシタ、および送信機を開発し、これらを備えた通信装置を駆動させ、一定の距離で音波を受信することを確認し、シビレエイの自律的な海底探査が可能なことを実証する必要があります。
また、今回はあくまで非常に狭い範囲の海域でシビレエイを泳がせてその位置を受信することで探査を実証しましたが、もっと広い範囲で長時間行うことで、どんな海域のどんな情報が得られるか、といったことを具体的に調査し、その特徴により効率的な海洋探査へとつなげていく必要があります。
シビレエイは極めて特徴的な動物であり、学術研究としてその海洋探査への応用可能性を検証することに意義はありますが、現実にはそれほどシビレエイが頻繁に捕れるわけではありません。ここで得られた知見をもとに、より一般的な底棲生物などを対象にし、また生物の物理的な動きや周囲の潮流の調査、あるいは生物の化学エネルギーなどを利用した発電方法の開発と併せて研究を進めることで、広範囲の海底探査への応用が期待できます。
補足説明
1.底棲生物
水域に生息する生物の中でも底質に生息する生物の総称。貝類や甲殻類、棘皮動物などがその代表的な例であるが、今回用いたエイの中にも底棲性のものがいる。
2.シビレエイ
デンキウナギ、デンキナマズと同じく強い電気を発生する強電気魚の一種。全長35cm程度。一部の種は日本近海にも生息する。使用した種の学名は Narke japonica。
3.生物エージェント
ここでは海底探査を、人や機械の代理(エージェント)として担う生物という意味。
4.ピンガー
魚などの海中生物の行動を研究するために開発された小型の超音波発振器のこと。超音波を送出するとき、ping pingと音がするのでピンガー(pinger)と呼ぶようになった。
5.DeSET
DeSETは、2017年4月から開始された、公益財団法人日本財団、日本先端科学技術教育人材研究開発機構(JASTO)、株式会社リバネスの共同事業。本事業は、XY軸方向の分解能が100m以下の海底地形図を地球上の全海域に渡って作成することを最終目標とし、その実現を飛躍的に加速しうる技術を日本国内から生み出すことを目的として行われている。
ウェブサイト:DeSET:海底探査技術開発プロジェクト
6.音響ビーム
海底の深さを測るために船底装備のトランスデューサーから発射する音波。音波が海底で反射し、受信されるまでの時間を測り、水深を測定する。
7.光学探査
比較的浅い海域において、光学的に撮影した衛星画像により、海底地形を推定するモデルを構築し、水深0~20m程度の海底地形データを作成する手法。浅海域に限られるが、リモートで探査が可能なことから広域探査に向いている。
8.自律型海中ロボット
人が直接行くことのできない海中を探査するために、人が直接乗り込んだり、ケーブルを用いたりせずに、全自動で行動するロボット(AUV: Autonomous Underwater Vehicle)。
共同研究グループ
理化学研究所 生命機能科学研究センター
集積バイオデバイス研究チーム
チームリーダー 田中 陽(たなか よう)
研究員 船野 俊一(ふなの しゅんいち)
上級研究員 田中 信行(たなか のぶゆき)
技師 天谷 諭(あまや さとし)
株式会社アクアサウンド
会長 笹倉 豊喜(ささくら とよき)
水産大学校
名誉教授 濱野 明(はまの あきら)
研究支援
本研究は、日本財団、日本先端科学技術教育人材研究開発機構(JASTO)、株式会社リバネスによる海底探査のための技術開発プロジェクト「DeSET[5]」と、日本学術振興会(JSPS)科学研究費補助金挑戦的研究(萌芽)「生物と機械のハイブリッドロボットによる海底・宇宙探索(研究代表者:田中陽)」による支援を受けて行われました。
また、北海道大学北方生物圏フィールド科学センター宮下和士教授、島根大学エスチュアリー研究センター南憲吏助教の実験協力によるものです。
原論文情報
Shun-ichi Funano, Nobuyuki Tanaka, Satoshi Amaya, Akira Hamano, Toyoki Sasakura & Yo Tanaka, “Movement tracing and analysis of benthic sting ray (Dasyatis akajei) and electric ray (Narke japonica) toward seabed exploration”, SN Applied Sciences, 10.1007/s42452-020-03967-6
発表者
理化学研究所
生命機能科学研究センター 集積バイオデバイス研究チーム
チームリーダー 田中 陽(たなか よう)
研究員 船野 俊一(ふなの しゅんいち)
上級研究員 田中 信行(たなか のぶゆき)
報道担当
理化学研究所 広報室 報道担当
株式会社リバネス DeSET運営事務局

