2023-04-03 アメリカ合衆国・マサチューセッツ工科大学(MIT)
・ MIT が、一回の把持でオブジェクトを正確に特定する、高分解能タッチセンシングを備えたロボットハンドを開発。
・ ロボットハンドの多くは高性能センサーを指先に装着するため、オブジェクトへの完全な接触に把持を繰り返す必要がある。また、指全体に低分解能センサーを相殺する設計では詳細を得ることが難しく、大抵は把持を繰り返すことになる。
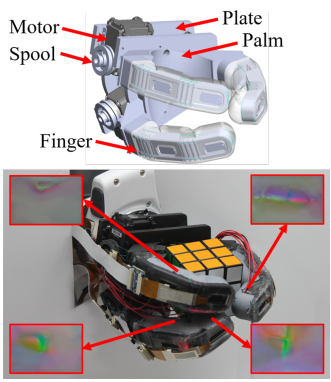
・ 新ロボットハンドの指は、3Dプリント作製した硬い内骨格を柔軟なシリコン製の外部層で包んだ構造。モールディングを通じて内骨格をシリコンで包むため、ファスナーや接着剤が不要。
・ 内骨格の各関節のヒンジに微小な湾曲を加え、シリコンの曲げを分散することでひずみを減少させてシリコンの剥がれの問題に対処すると共に指の耐久性を向上させた。湾曲したモールド設計により、各指は静止時に人間の指のような若干湾曲した自然な状態となる。
・ 透明なシリコン製の「皮膚」の下の各指の内骨格の先端と中間部分に高解像度の GelSight タッチセンサーを搭載。同センサーは、カメラと 3 色 LEDs で構成され、指がオブジェクトを把持すると LEDs が内側から柔軟な皮膚を照らし、カメラが 6 枚の画像を捉える。
・ これらの画像はカメラ画像の生データで訓練された機械学習アルゴリズムに送られ、オブジェクトを特定するためのインプットとして利用される。ロボットハンドは、一回の把握で約 85%の精度でオブジェクトを特定する。
・ 頑丈な内骨格はドリル等の重いオブジェクトも持ち上げられ、柔軟な外部層が空のプラスチックボトルを潰さずにしっかりと把持する。人間の手の機能に着想した確実で柔軟な握力のため、高齢者を支援するホームケアロボットとして有用。入浴の支援や重いオブジェクトを棚から取り出すこと等ができる。
・ 指に複数のセンサーを搭載しているが、センシング機能を備えた掌部を追加すれば触覚センシングをさらに向上できる可能性がある。今後は使用に伴うシリコンの傷みの低減や、親指部にアクチュエーション機能を追加して遂行可能なタスクの範囲の拡大を目指す。
・ 本研究は、Toyota Research Institutte、米国海軍研究室(ONR)および SINTEF BIFROSTproject が支援した。
URL: https://news.mit.edu/2023/robotic-hand-can-identify-objects-just-one-grasp-0403
<NEDO海外技術情報より>
関連情報
IEEE Conference on Soft Robotics (RoboSoft) 2023 発表論文(フルテキスト)
GelSight EndoFlex: A Soft Endoskeleton Hand with Continuous High-Resolution Tactile Sensing
URL: https://arxiv.org/pdf/2303.17935.pdf
Abstract
We describe a novel three-finger robot hand that has high resolution tactile sensing along the entire length of each finger. The fingers are compliant, constructed with a soft shell supported with a flexible endoskeleton. Each finger contains two cameras, allowing tactile data to be gathered along the front and side surfaces of the fingers. The gripper can perform an enveloping grasp of an object and extract a large amount of rich tactile data in a single grasp. By capturing data from many parts of the grasped object at once, we can do object recognition with a single grasp rather than requiring multiple touches. We describe our novel design and construction techniques which allow us to simultaneously satisfy the requirements of compliance and strength, and high resolution tactile sensing over large areas.
")
")