 0301機体システム
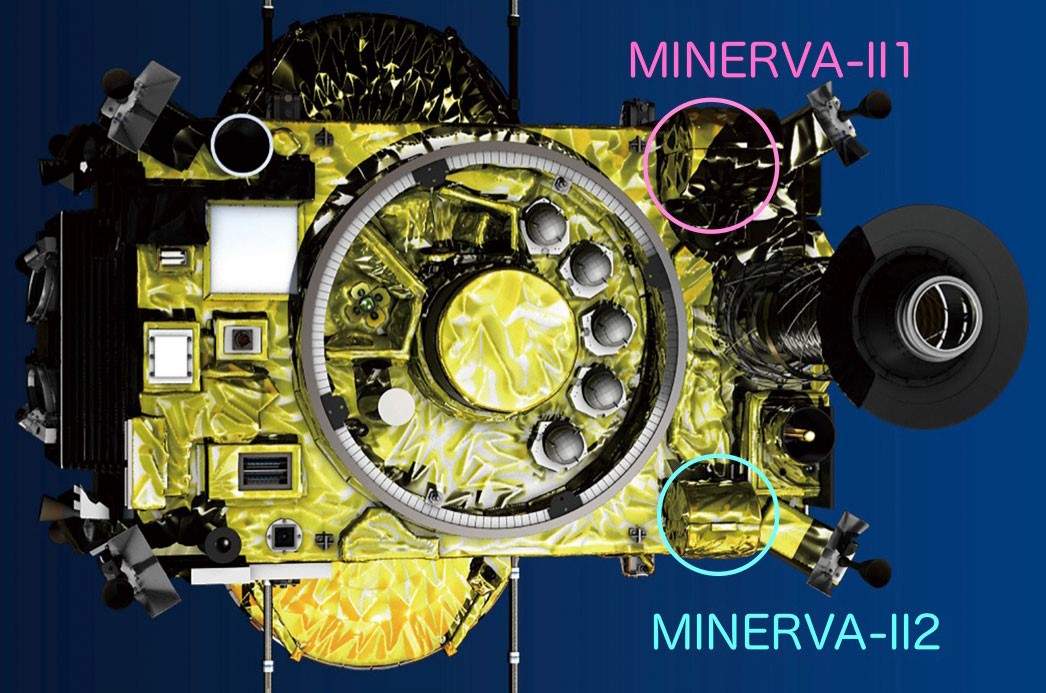
0301機体システム 小型探査ローバMINERVA-II1
2018/09/19 JAXA はやぶさ2プロジェクト 「MINERVA-II (MIcro Nano Experimental Robot Vehicle for Asteroid )」は初代「はやぶさ」に搭載された探査ローバ「MINE...
 0301機体システム
0301機体システム  0300航空・宇宙一般
0300航空・宇宙一般  0300航空・宇宙一般
0300航空・宇宙一般  0300航空・宇宙一般
0300航空・宇宙一般  0300航空・宇宙一般
0300航空・宇宙一般  0300航空・宇宙一般
0300航空・宇宙一般  0300航空・宇宙一般
0300航空・宇宙一般  0300航空・宇宙一般
0300航空・宇宙一般  0300航空・宇宙一般
0300航空・宇宙一般  0300航空・宇宙一般
0300航空・宇宙一般  0300航空・宇宙一般
0300航空・宇宙一般  0300航空・宇宙一般
0300航空・宇宙一般